1) inverse kinematics

位置反解
1.
Its characteristic of the structural layout is introduced, the inverse kinematics equations and the architecture constraints are established.
针对一种新型三自由度并联机床进行了研究,介绍了其结构布局特点,推导出位置反解方程,建立了结构约束条件,采用数值分析方法绘制出了工作空间的Z截面边界图以及三维立体图,并定量分析了机构尺寸参数对工作空间体积大小的影响,这些对该并联机床的合理化设计很有意义。
2.
The eigenvalues and eigenvectors of the matrix are computed and the inverse kinematics of 6R manipulators is solved.
通过分离方程组中多项式的系数,构造一个16×16实数矩阵,计算矩阵的特征值和特征向量求出机械手的位置反解,并将该算法用C++来实现。
3.
Making use of the property that it is easy to obtain the inverse kinematics of 6-DOF parallel manipulator,the forward kinematics of the 6-DOF parallel manipulator is transformed into using inversed kinematics results through training and learning.
利用六自由度并联机器人位置反解易于获得这一特性,把较难的六自由度并联机器人位置正解问题转化为应用位置反解结果作为训练样本进行学习,从而实现操作手从关节变量空间到工作变量空间的非线性映射,这样就能够较准确地求解并联机器人的位置和姿态。
2) inverse displacement analysis
位置反解
1.
And the robot s forward displacement analysis and the inverse displacement analysis were studied by the method.
提出一种新的平面三自由度并联冗余机器人位置分析方法 ,运用这种方法进行了位置正解和位置反解分析 。
2.
And the robot s forward displacement analysis and inverse displacement analysis are studied by the method.
本文提出一种新的平面三自由度并联冗余机器人位置分析方法 ,运用这种方法进行了位置正解和位置反解分析 。
3.
The grouping of solutions to the set of equations for inverse displacement analysis of 3 RPS orientational parallel manipulators is revealed at first.
首先揭示了3-RPS控制姿态用并联机器人机构位置反解方程组解的分组特点,然后应用连续法求解多项式方程组时构造初始方程组的原则,给出了该机构位置反解的高效算法。
3) Inverse position
位置反解
1.
It had put forward an effective new method to resolve the inverse position by using the conversion of coordinates and projection in analytic geometry,and the inverse position was simulated and verified by MATLAB.
运用解析几何中的坐标变换和投影,得出一种有效求解位置反解的新方法,通过MATLAB软件对该方法进行了仿真和验证。
4) inverse kinematic
位置反解
1.
To control a robot real-time,the analysis of inverse kinematic of 6R serial robot is very important in the research of robotics.
在实时控制中,6R机器人的位置反解具有非常重要的理论和实际意义。
2.
and the formulas of its inverse kinematics arededuled.
推导出了其位置反解的解析式。
5) inverse kinematic analysis
位置反解
1.
New method of inverse kinematic analysis of special-dimension serial robot;
具有特殊尺寸机器人的位置反解算法
6) forward and reverse position
位置正反解
1.
The forward and reverse position are analyzed by using the spherical analytic theory, and corresponding numerical examples are also given to show the relations between the inputs and the outputs.
运用球面解析理论分析了球面机构的位置正反解,并举例说明输入和输出之间的关系。
补充资料:反饥饿、反内战、反迫害运动
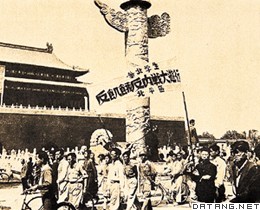
| 反饥饿、反内战、反迫害运动 中国解放战争时期国民党统治区广大学生的民主爱国运动。1947年,国民党统治区爆发了空前严重的经济危机,广大人民反对国民党统治的斗争日益高涨。5月4日,上海学生上街进行反对内战的宣传,遭到国民党军警的镇压。各校学生在中国共产党的领导下立即罢课抗议并到市政府请愿。9日,近2万名电车、汽车及丝织工人罢工游行,要求增加工资。15日,南京中央大学等校3000余人,赴教育部进行反内战请愿。16日,北京大学院系联合会提出“反饥饿、反内战”的口号,北平各大学相继举行了罢课。学生运动的蓬勃发展,使国民党当局极为惊恐,于18日颁布《维持社会秩序临时办法》,严禁10人以上的请愿和一切罢工罢课游行示威。5月20日,京沪苏杭地区16个专科以上学校6000余名学生在南京举行挽救教育危机联合请愿游行,并向国民参政会请愿,遭到国民党宪兵、警察、特务的殴打,百余名学生被打伤,20多人被抓走。同日,平津学生也分别举行反饥饿、反内战的游行活动,天津学生在示威中遭毒打,50余名学生被军警殴伤,造成震惊全国的五二○血案。血案发生后,中国共产党提出反迫害的口号,把运动推向新的阶段。上海、南京、天津、北平等60多个城市的学生纷纷行动起来,举行罢课和上街游行示威。6月19日各地学生代表在上海集会,成立了中国学生联合会。学生运动与工人、农民、市民的斗争结合在一起,形成了反对蒋介石反动统治的第二条战线,有力地配合了人民解放军的作战。
|
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条