1) hysteretic model

迟滞模型
1.
Since the high-nonlinearly hysteretic model can t be identified by the extended Kalman filt.
鉴于该模型具有高度的非线性,传统的参数识别方法不再适用,本文根据非线性系统状态参数估计理论,利用多项式一阶近似技术来代替EKF滤波技术中的求导线性化过程,估计迟滞模型的非线性参数。
2) PI hysteresis model
PI迟滞模型
3) inverse hysteresis model
迟滞逆模型
1.
A neural-network-based inverse hysteresis model;
基于神经网络的迟滞逆模型
4) Cleary time lag model
Cleary迟滞模型
1.
To predict the time history response of spot-type smoke detectors to fire signals,a parameter calibration method for the Cleary time lag model is proposed based on numerical wind tunnel experiments using the fire dynamics simulator(FDS) code.
为预测点型感烟火灾探测器的响应信号时程,提出了采用FDS软件进行数值风洞实验、标定探测器Cleary迟滞模型参数的方法和步骤。
5) dynamic hysteresis model
动态迟滞模型
1.
The dynamic hysteresis model was proposed by combining Gamma filters and structure PI model.
融合Gamma滤波和PI模型的结构,提出压电陶瓷的动态迟滞模型。
2.
The hybrid neural network dynamic hysteresis model, which consists of two dynamic neural networks in a cascade form,is proposed to approximate the hysteresis characteristics of piezoceramic actuator.
提出了两个动态神经网络串联的混合神经网络动态迟滞模型,用以逼近压电陶瓷的迟滞特性。
3.
Then the dynamic hysteresis model of micro-stage was established and the experiments about the control strategy were performed.
因此,采用结构嵌套方式,将压电陶瓷/压电驱动器作为操作台的驱动部件,结合放大机构和平行导向机构构建了柔性一体化大行程二维微操作台,建立了微操作台的动态迟滞模型并对其控制特性可控制方法进行了实验研究。
6) hysteresis damping model
迟滞阻尼力模型
1.
Damping force properties of magnetorheological fluid are experimented and the viscous and bilinear hysteresis damping model is presented.
研究了磁流体的阻尼力特性,提出了基于粘性阻尼和回滞阻尼组成的迟滞阻尼力模型,进行了磁流变阻尼器阻尼力的响应谱分析,并用Newmark数值积分方法分析了带有磁流变流体阻尼器梁结构的多自由度振动系统在不同磁场强度和激励频率作用下的位移响应。
2.
Damping force properties of Magnetorheological fluid are experimented and the viscous and bilinear hysteresis damping model is established and presented in this article.
通过实验研究了磁流体的阻尼力特性,提出了基于粘性阻尼和回滞阻尼组成的迟滞阻尼力模型,并应用迭代摄动法分析了含有磁流体阻尼器梁结构的特征值谱。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
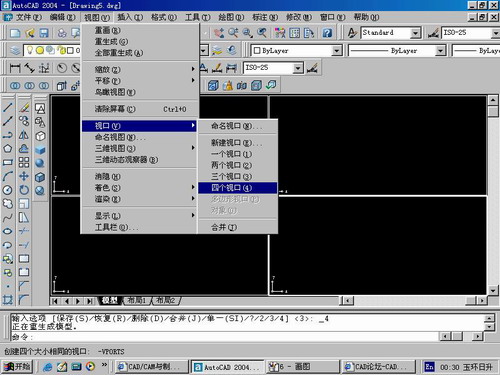
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
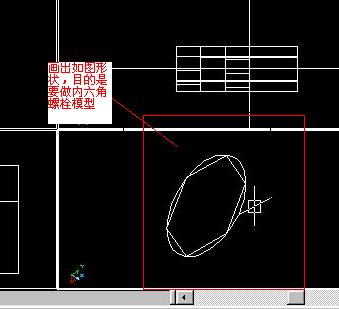
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
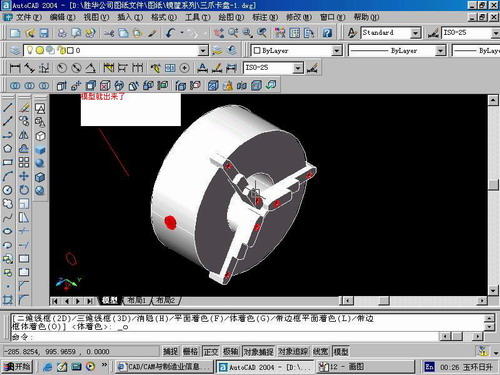
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条