1) crunode model

接点模型
2) point and surface contact model
点面接触模型
1.
By using modified Lagrangian formula,the simulation is taken on viscous contact between mortar bubble and soil ground by point and surface contact model.
首先,基于有限变形理论,采用点面接触模型模拟注浆过程中浆泡与土体之间的相互作用关系,通过拉格朗日方法引入这种相互作用关系,用约束变分原理建立适合模拟 CCG 注浆过程的控制方程;然后,根据在试验中观察到的现象建立注浆过程模型编制的有限元程序,动态模拟 CCG 注浆过程,为 CCG 注浆施工的优化设计奠定了基础。
3) employee contact point model
雇员接触点模型
4) multi-point grounding model
多点接地模型
1.
Based on multi-point grounding model of battery packs,maximum leakage current and concept of battery equivalent grounding resistance,measurement method and expression under multi-point grounding model are proposed in this paper,and also study on the issue of battery grounding.
本文基于电池组多点接地的模型,提出最大漏电流和多点接地模型下电池组等效接地电阻的的概念、测量方法及表达式,对电池组的接地问题进行研究。
5) connecting point pattern
接点模式
1.
Taking the basic theories of modem linguistics as the key point, this paper proposes the concept of "connecting point pattern" through a mass of practical corpus analysis and sentence connecting method study, asserts that connecting point and connecting point position are the necessary factors in .
以现代语言学基本理论立论,对句群接应手段进行研究,提出了“接点模式”的概念,认为 “接点”和“接点位置”是句群接应的必备要素,从大量语料中总结出句群接点模式的基本型和特殊型的13种具体 模式。
6) point-to-point model
点到点模型
1.
This paper deals with the routing planning of the delivery vehicle navigation in logistics,and proposes an improved particle swarm optimization algorithm suitable for the point-to-point model of vehicle routing planning.
为解决物流配送车辆导航中的路径规划问题,文章以点对点模型为基础,对基本粒子群优化算法在初始种群的产生方法和种群的进化策略进行改进,提出适于配送车辆导航中路径规划点到点模型的改进型粒子群优化算法,并通过仿真试验验证了算法的有效性和快速运算能力。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
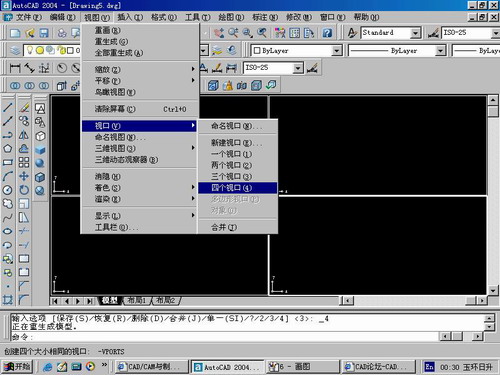
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
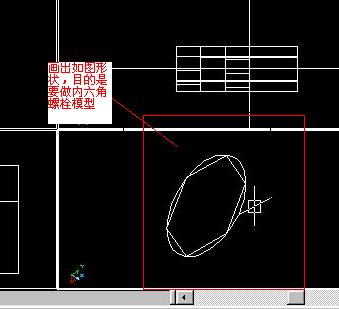
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
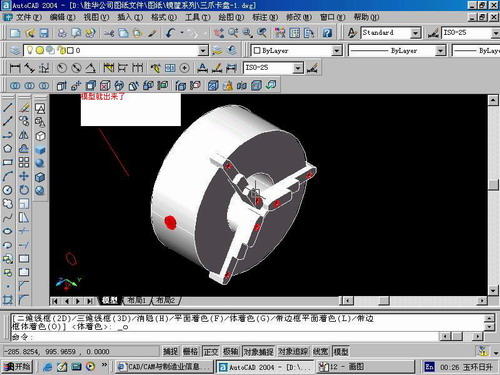
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条