1) model inversion

模型反演
1.
Application of geological model inversion technique to prediction of subtle reservoir
地质模型反演预测隐蔽油气藏
2.
Using the deformation model inversion theory, combining the model datum design with the se-quential optimum design for model discrimination .
利用形变模型反演理论,把模型基准设计与用于模型识别的序贯优化设计结合起来,提出了解决监测网零级优化设计问题的新方法。
3.
This paper analyze the development of inversion technology, and has thefurther study on Recursive Inversion, Model Inversion, Geostatistics Inversion,discusses some problems on these inversion technology, and compares theadvantages and dis.
目前,以叠后反演应用最为广泛,叠后反演主要包括道积分、递推反演、模型反演和地质统计反演。
3) inverse model
反演模型
1.
Study on stress wave inverse model for jointed rock masses;
节理岩体应力波反演模型研究
4) retrieval model
反演模型
1.
Landsat TM image-based retrieval model of water clarity:a case study of Lake Poyang National Nature Reserve,China;
基于TM影像的水体透明度反演模型——以鄱阳湖国家自然保护区为例
2.
Otherwise,chlorophyll a retrieval model was built using the synchronous spectrum data obtained in different season to evaluate the effect of chlorophyll a concentration temporal and spatial variation on the retrieval model.
利用2005年实测叶绿素a浓度数据分析了太湖叶绿素a浓度的时空分布特征,并利用同步光谱数据,分季节对太湖叶绿素a浓度的反演模型进行研究,从而分析叶绿素a的时空变化对反演模型的影响。
3.
Aiming at the main problems in establishing a neural network model for retrieval of the ocean surface wind vector from SeaWinds data,and in consideration of the SeaWinds scatterometer s geometry observation characteristics,the paper presents a neural network retrieval model and a corresponding algorithm,which are suitable to the conical scanning mode of the scatterometer.
针对构建用 SeaWinds 散射计数据反演海面风矢量的神经网络模型所面临的主要问题,结合 SeaWinds 散射计的几何观测特征,提出了适合 SeaWinds 散射计旋转圆锥扫描方式的先风向后风速的两步神经网络反演模型及相应算法,并采用两组不同的 L2A 和相应 L2B 数据及浮标数据对该神经网络反演模型进行了初步验证。
5) inversion modeling
模型正反演
6) BRDF model inversion
BRDF模型反演
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
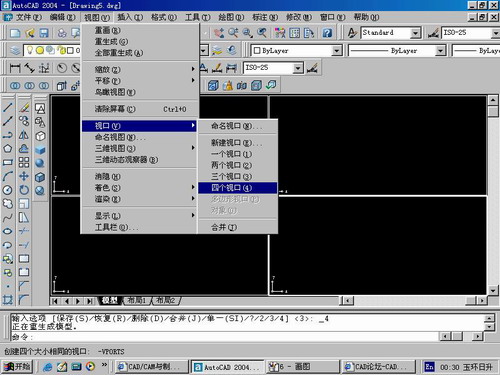
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
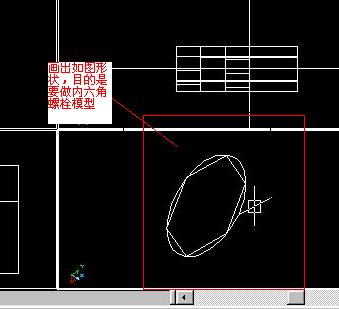
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
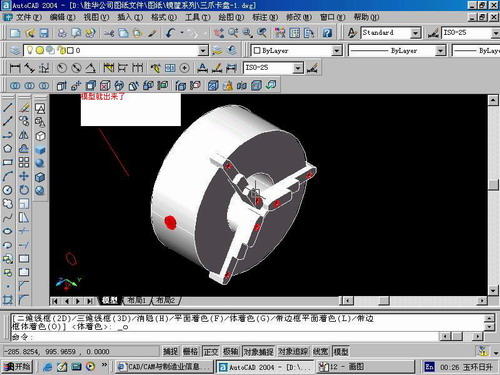
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条