1) servo screwdown system

伺服压下系统
1.
The servo screwdown system of a rolling mill has the characteristics of big rolling force, the influence of displacement feedback apparatus dynamic stiffness on system should be considered.
轧机伺服压下系统具有轧制力大的特点,其位移反馈机构的动刚度对系统的影响应予以考虑。
2) suction servo system
负压伺服系统
1.
This article mainly describes the composition of the catcher drum of PASSIM70 plug assembler and the working principle of the suction servo system which controls the cigarettes to be positioned correctly and the cigarettes to be braked(stopped), and it analyses the case of the cigarettes which get forced on the catcher drum and their strokes.
主要介绍PASSIM70烟支滤嘴接装机捕烟鼓轮的组成及负压伺服系统控制烟支正确到位和烟支制动的工作原理,并对烟支在捕烟鼓轮上的受力情况和烟支的行程进行了分析。
3) Hydraulic servo system
液压伺服系统
1.
Simulation of valve-controlled cylinder hydraulic servo system based on AMESim;
基于AMESim的阀控液压缸液压伺服系统仿真
2.
A novel method of model reference adaptive fuzzy control in hydraulic servo system;
液压伺服系统的模型参考自适应模糊控制新方法
3.
Design of H_∞ observer for hydraulic servo system
液压伺服系统的H_∞观测器设计
4) Servo hydraulic system
伺服液压系统
5) hydraulic pressure servo system
液压伺服系统
1.
Design on the Hydraulic Pressure Servo System of Electro-hydraulic Control Steamer;
电液调节汽轮机液压伺服系统的设计
2.
Identification of hydraulic pressure servo system;
轧钢机液压伺服系统的数模辨识
3.
Experiment study of a force control aimed hydraulic pressure servo system on electric simulator by DSP control;
基于电模拟器的力控液压伺服系统DSP控制实验的研究
6) pneumatic servo system
气压伺服系统
1.
Modeling and characteristics of pneumatic servo system
气压伺服系统的建模与特性
2.
To improve the robustness of control systems,a nonlinear auto-disturbance rejection control(ADRC) technique for pneumatic servo systems was developed and a parameter setting method was given.
为提高控制系统的鲁棒性,增强干扰抑制能力,提出了适用于气压伺服系统的自抗扰控制器方案,并讨论了控制参数的整定。
3.
The pneumatic hydraulic combination control system(PHCC) is a new kind of compound medium transmission of gas and liquid which is based on the traditional pneumatic servo system and into which the liquid medium is led.
介绍了气液复合介质控制系统的原理及构成 ,在常规气压伺服系统的基础上 ,建立了一种新型气液复合介质控制系统 ,采用模糊控制方法控制气液联控串联式位置伺服系统 ,对系统跟踪阶跃、正弦、方波和斜坡等典型输入信号的响应进行了试验 。
补充资料:传动:液压伺服系统
以高压液体作为驱动源的伺服系统。液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统﹐分为机械液压伺服系统和电气液压伺服系统(简称电液伺服系统)两类。其中﹐机械液压伺服系统应用较早﹐主要用於飞机的舵面控制和机床仿型装置上。随著电液伺服阀的出现﹐电液伺服系统在自动化领域佔有重要位置。很多大功率快速响应的位置控制和力控制都应用电液伺服系统﹐如飞机﹑导弹的舵机控制系统﹐船舶的舵机系统﹐雷达﹑大炮的随动系统﹐轧钢机械的液压压下系统﹐机械手控制和各种科学试验装置(飞行模拟转台﹑振动试验台)等。
液压伺服系统与电气伺服系统相比有三个优点﹕(1)体积小﹐重量轻﹐惯性小﹐可靠性好﹐输出功率大﹔(2)快速性好﹔(3)刚度大(即输出位移受外负载影响小)﹐定位準确。缺点是加工难度高﹐抗污染能力差﹐维护不易﹐成本较高。
电液伺服系统 电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。最常见的有电液位置伺服系统﹑电液速度控制系统和电液力(或力矩)控制系统。
图1 电液位置伺服系统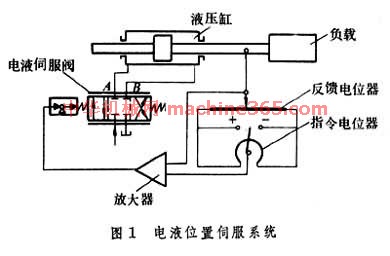 是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。
是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。
电液伺服系统中常用的位置检测元件有自整角机﹑旋转变压器﹑感应同步器和差动变压器等。伺服放大器为伺服阀提供所需要的驱动电流。电液伺服阀的作用是将小功率的电信号转换为阀的运动﹐以控制流向液压动力机构的流量和压力。因此﹐电液伺服阀既是电液转换元件又是功率放大元件﹐它的性能对系统的特性影响很大﹐是电液伺服系统中的关键元件。液压动力机构由液压控制元件﹑执行机构和控制对象组成。液压控制元件常採用液压控制阀或伺服变量泵。常用的液压执行机构有液压缸和液压马达。液压动力机构的动态特性在很大程度上决定了电液伺服系统的性能。
液压伺服系统与电气伺服系统相比有三个优点﹕(1)体积小﹐重量轻﹐惯性小﹐可靠性好﹐输出功率大﹔(2)快速性好﹔(3)刚度大(即输出位移受外负载影响小)﹐定位準确。缺点是加工难度高﹐抗污染能力差﹐维护不易﹐成本较高。
电液伺服系统 电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。最常见的有电液位置伺服系统﹑电液速度控制系统和电液力(或力矩)控制系统。
图1 电液位置伺服系统
是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。 电液伺服系统中常用的位置检测元件有自整角机﹑旋转变压器﹑感应同步器和差动变压器等。伺服放大器为伺服阀提供所需要的驱动电流。电液伺服阀的作用是将小功率的电信号转换为阀的运动﹐以控制流向液压动力机构的流量和压力。因此﹐电液伺服阀既是电液转换元件又是功率放大元件﹐它的性能对系统的特性影响很大﹐是电液伺服系统中的关键元件。液压动力机构由液压控制元件﹑执行机构和控制对象组成。液压控制元件常採用液压控制阀或伺服变量泵。常用的液压执行机构有液压缸和液压马达。液压动力机构的动态特性在很大程度上决定了电液伺服系统的性能。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条