1) electromechanical interface model

机电接口模型
1.
The electromechanical interface model of the structure of Z-input silicon micromachined gyroscope is established.
文中以Z轴硅微机械陀螺仪的理论模型为对象,建立了陀螺仪机电接口模型,分析了模型中寄生电容和电阻对有用信号和噪声的影响。
2) interface model
接口模型
1.
Host system management interface model based on Web services distrib uted management;
基于WSDM的主机系统管理接口模型研究
2.
The horizontal interface model between the IPTV terminal and the thr.
采用IPTV终端与三网的横向接口模型,可以解决目前在业务整合阶段标准化接口模型架构的问题;采用以横向架构为基础的纵向协议接口模型,可以确定协议接口标准化向全IP演进的方向;以标准协议接口为基础,在IPTV中引入中间件的方式能够有效降低应用开发的门槛。
3.
A software/hardware interface model based on ARM(advanced reduced instruction set computer machine) kernel CPU(central processing unit) is designed.
设计了一种基于高级精简指令集处理器核处理器的无线通信系统接口模型,叙述了硬件接口的定义及相应软件接口模块的实现。
4) mechatronics interface
机电接口
1.
By researching the mechatronics system s components and their relationships, the concept, function and classification of mechatronics interface technology are given.
探讨了机电一体化的发展过程和现状,指出了机电一体化系统设计的必要性;以此为背景,产生了机电接口技术;在分析和研究机电一体化系统(简称机电系统)的基础上,提出了机电系统模型;通过对机电系统模型的组成及其关系的研究,得出了机电接口技术的内涵、功能和分类;机电接口技术为机电一体化系统设计提供了一种新方法和手段,展望了机电接口技术的发展方向为智能化、标准化、微型化和人格化。
5) Interface meta-model
接口元模型
6) motor model
电机模型
1.
The establishing method of a motor model, function of torque and flux linkage block ring controller and requirements for pulse optimum selector are described in detail.
以 ABB公司 ACS6 0 0 Single Drive变频器为例介绍了异步电动机直接转矩控制的基本原理与实现方法 ,着重阐述了电机模型建立方法 ;转矩与磁链滞环控制器的功能 ;脉冲优化选择器的要求。
2.
The emphasis is laid upon the establishment of the motor model under the condition of the characteristics of the motor input impedance at high frequencies.
研究在电机驱动系统中,电力线通信的建模问题,着重讨论在高频时电机输入阻抗的特性下,电机模型的建立。
3.
What’s more, the establishment of the motor model is also discussed, especially when it is under the condition of characteristics of the motor input impedance with high frequency.
通过分析电力线信道的信息传输特性来建立电力线的传输模型,并讨论了电机模型的建立,尤其是在高频时电机输入阻抗的特性下。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
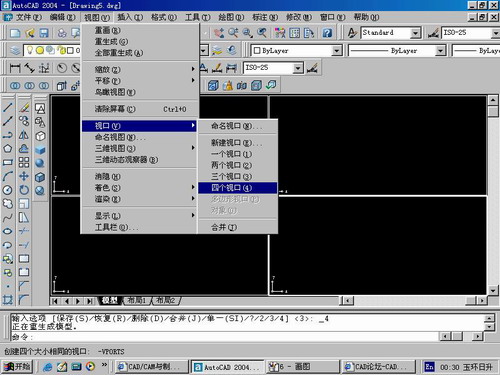
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
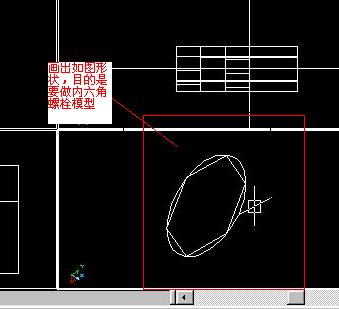
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
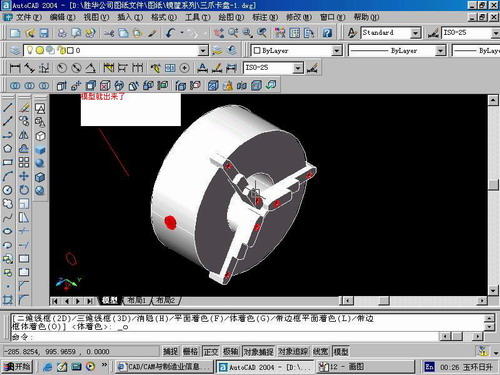
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条