1) unified model

统一模型
1.
A unified model for harmonics and reactive current closed-loop or open-loop detection was established based on instantaneous reactive power theory.
基于瞬时无功功率理论建立了谐波及无功电流检测系统闭环、开环的统一模型。
2.
the article constructs a unified model of gravity and electromagnetic with torsion both in internal sp ace and in four-demensional space-time.
应用纤维丛理论 ,在内部空间和四维时空引入挠率 ,建立了引力与电磁场的统一模型 。
3.
Relationship between forces born by bridge and rail under the action of temperature variation, deflection and braking are analysed by using bridge ballast rail as an unified model, and simply supported bridges, 30 m and 40 m in span length, are calculated with a programme of finite element of two dimensional frame structure.
利用桥梁—道碴—轨道的统一模型,对桥梁温度伸缩、桥梁挠曲作用以及制动力作用下的桥轨受力关系进行了分析,并利用平面杆系有限元程序对30m及40m简支梁桥进行了计
2) uniform model
统一模型
1.
By deep researching into the intelligent controls-oriented virtual instrument(ICVI) and its development system,the quintuple systematic model based on computer is introduced into ICVI systems,the uniform model of ICVI is built up and dissertated it in detail.
通过对智能控件化虚拟仪器及其开发系统的深入研究,将基于计算机的系统五元模型引入到智能控件化虚拟仪器系统,提出并详细论述了智能控件化虚拟仪器系统的统一模型。
3) unified BOM model
统一BOM模型
1.
This gives necessity and great importance to construct the unified BOM model in the informatization in manufacturing industry.
各种BOM之间的不一致性问题严重影响了企业产品设计、生产和管理等过程的集成和效率,增加了产品生产成本、延长了产品开发周期,所以建立产品全生命周期内的统一BOM模型对制造业信息化的进程具有十分重要的意义。
2.
On the basis of the EXPRESS-G,a unified BOM model based on STEP is illustrated in EXPRESS from the following four aspects: referenced generic resources,the type definition and the entity definition of items as well as their relationships.
在统一BOM模型的EXPRESS-G图基础上,从引用通用资源、类型定义、物料项实体定义、物料项关系实体定义4个方面详细阐述了基于STEP标准的统一BOM模型的EXPRESS语言描述。
5) unified model
核统一模型
6) United Model
统一模型,一致化模型
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
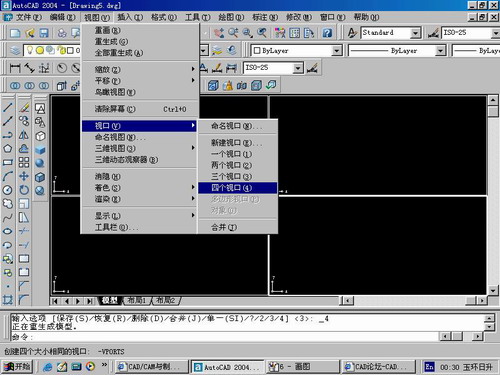
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
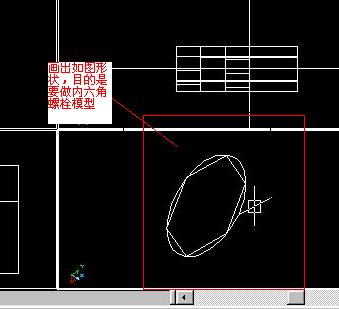
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
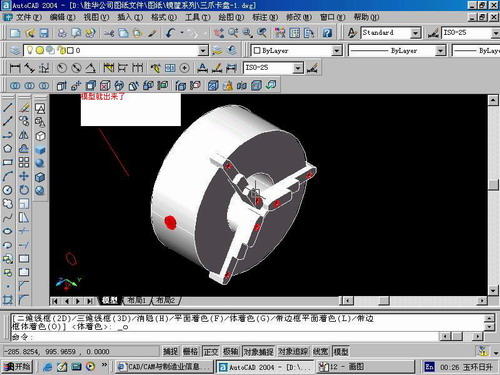
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条