1) harmonic planet transmission

谐波行星传动
2) rod transmission of harmonic planetary
杆式谐波行星传动
3) harmonic drive
谐波传动
1.
Study on the harmonic drive system with precision numerical control;
精密数控谐波传动系统研究
2.
Design and Manufacturing of Harmonic Drive Flexible Gear on the Principle or Converted Engagement Reappearance;
接转化啮合再现法设计加工谐波传动柔轮
3.
A New Type of Face Harmonic Drive With a Electromagnetic Wave- Generator;
新型电磁端面谐波传动装置
5) planetary gear transmission
行星传动
1.
Comparing many types of transmission,this paper chooses the multiple-level planetary gear transmission to meet the transmission ratio conditions.
首先分析了增速机构设计在履带车辆电磁悬挂设计中的作用,通过选择增速机构的传动方案,得到了满足传动比条件的多级行星传动。
2.
The relation between the radial deformation of the central internal gear in planetary gear transmission and the number of planet gears is derived in this paper.
导出了行星传动中的内啮合中心轮齿圈径向变形与行星轮数目之间的关系,并指出:从提高内啮合中心轮齿圈的柔度出发,行星轮数目应选择荐用范围的下限。
3.
In this paper, the main constraints for the designing of NN type of involute planetary gear transmission are discussed, a concise and practical method for determining the addendum modification coefficients is proposed and some appropriate parameters are provided.
对NN型行星传动的主要限制条件进行了讨论,提供了一种简明实用的变位系数确定方法,推荐了参数选用
6) planetary transmission
行星传动
1.
The Fuzzy Optimization of Multi-objective For the Planetary Transmission Based On The Genetic Algorithm;
基于遗传算法的行星传动多目标模糊优化
2.
Research on the Gear Geometry of Cycloid Enveloping Planetary Transmission;
摆线包络行星传动啮合理论研究
3.
In order to provide the reference to design eccentric wheel handspike planetary transmission,two contact bodies(eccentric wheel and the roller of movable tooth) have been regarded as the perfect elasticity and not to count the dynamic effect of load.
为给偏心轮推杆行星传动的设计提供参考,将偏心轮与活齿内滚柱两接触体视为完全弹性且不计载荷的动力效应,在考虑摩擦的前提下,对偏心轮与内滚柱接触的主应力、最大剪应力、最大八面体剪应力、最大正交剪应力进行了分析和计算。
补充资料:传动:谐波传动
由波发生器﹑柔性件和刚性件 3个基本构件组成的机械传动。这种传动是在波发生器的作用下﹐使柔性件產生弹性变形并与刚性件相互作用而达到传递运动或动力的目的。在传动中波发生器迴转一周﹐柔性件上某一点循环变形的次数称波数。柔性件的变形过程是一个基本对称的谐波(图1 双波柔轮的变化波形 )﹐故称为谐波传动。常用的谐波传动是双波传动。
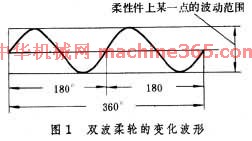
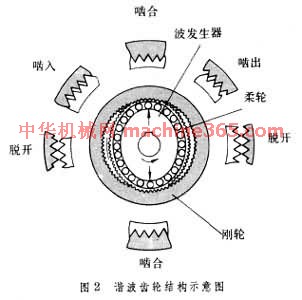
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。
谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
图2 谐波齿轮结构示意图 为一个外周有许多齿( 120个以上)的柔轮与一个内周有齿的刚轮相嚙合进行传动﹐称为谐波齿轮传动。假设将齿数无限增多﹐齿高也无限减小﹐则成为柔轮外表面和刚轮内表面在波发生器长轴方向上进行接触的谐波摩擦传动。由於这种接触点的摩擦力很小﹐传递的力矩不大﹐容易打滑﹐实际上应用很少。谐波传动也可以设计成由转动改为直线运动﹐成为谐波螺旋传动。在3种传动中以谐波齿轮传动应用最广。图2 谐波齿轮结构示意图 中波发生器是机械式波发生器﹐此外还有电磁式﹑液力式和气动式的波发生器﹐其中机械式波发生器应用最普遍。
谐波传动是美国人C.W.马瑟於1955年提出的专利﹐1959年得到批准﹐1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的﹐以后逐渐扩展到民用和一般机械上。一些国家如美国﹑日本﹑苏联已有了谐波齿轮减速器的系列化產品﹐在中国也制定了谐波齿轮的部颁标準。
工作原理 以谐波齿轮传动为例。它是利用柔轮﹑刚轮和波发生器的相对运动﹐特别是柔轮的可控弹性变形(形状改变)来实现运动和动力传递的。在这 3个基本构件中可任意固定一个﹐其餘一个为主动件一个为从动件。如果3个都不固定﹐则成为差动轮系。如以刚轮固定不变﹐以波发生器为主动件﹐柔轮为从动件﹐波发生器内的椭圆形凸轮在柔轮内旋转便使柔轮產生变形。在波发生器的椭圆形凸轮长轴两端处的柔轮轮齿和刚轮轮齿进入嚙合时﹐短轴两端处的柔轮轮齿与刚轮轮齿脱开。对於波发生器长轴和短轴之间的齿﹐沿柔轮和刚轮周长的不同区段内处於逐渐进入嚙合的半嚙合状态﹐称为嚙入﹔处於逐渐退出嚙合的半嚙合状态﹐称为嚙出。波发生器的连续转动﹐使嚙入﹑嚙合﹑嚙出和脱开四种运动不断改变各自原来的工作状态﹐这种运动称为错齿运动。错齿运动使输入转动变为输出运动。若刚轮固定不动﹐柔轮则相对於波发生器作反方向的转动。反之若柔轮固定不动﹐刚轮则相对於波发生器作同方向的转动。对於双波传动的谐波齿轮传动﹐它的转动规律是﹕波发生器转一周﹐柔轮相对於刚轮在周长方向转过两个齿距的弧长﹐其转动比计算如下﹕
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条