1) robot active olfaction

机器人主动嗅觉
1.
Secondly,the EGS-based robot active olfaction implementation procedure in the simulated environment is presented,including plume finding,plume tracking and odor source declaration.
提出了基于进化梯度搜索的多机器人主动嗅觉的一种实现策略。
3) olfactory robot
嗅觉机器人
1.
The main goal is to establish an olfactory robot system,which is a comprehensive,economic,simple structure,high degree of recognition and interface specification system.
本课题来源于国防科技基础研究基金资助项目,研究的主要目标在于建立一套完整、经济、结构简单、识别度高、接口规范的嗅觉机器人系统,现阶段已完成嗅觉机器人搜寻算法及硬件电路的设计,而机械载体部分还未设计,通过比较轮式、腿式、履带式结构机器人的特点,本文采用履带式的行走机构并对其设计,运用虚拟样机技术建立其三维实体模型进行仿真分析,可以缩短研发周期、降低开发成本。
4) active olfaction
主动嗅觉
1.
Study on the Active Olfaction of Robot Based on Particle Swarm Optimization;
基于粒子群优化的机器人主动嗅觉研究
2.
Study on the Realization Method of Active Olfaction Based on Multi-Agent;
基于群体智能的主动嗅觉实现方法研究
3.
The state of the art of active olfaction(also called mobile robot odor localization) is reviewed in detail.
对主动嗅觉(或称移动机器人气味/气体定位)问题的研究现状进行了较为详细的介绍。
6) machine olfaction
机器嗅觉
1.
The developing process of machine olfaction is reviewed.
简单介绍机器嗅觉的发展概况,依据人鼻内嗅觉感受器细胞的嗅感原理提出气敏传感器阵列的信号模型;概括分析机器嗅觉的多变量模式分析技术,从其气味识别算法的角度,重点介绍统计模式分析(线性和非线性)和智能模式分析(人工神经网络和其它)的基本方法,对机器嗅觉系统的实现具有一定的指导意义。
补充资料:长度计量技术:主动测量
机床或其他设备加工过程中的一种自动测量﹐也称在线测量。主动测量分为加工中主动测量和加工后主动测量两种。前者是指在加工的同时测量工件的尺寸和表面粗糙度等﹐并立即按测量所得信息调整加工条件﹐以保证不断加工出合格工件﹔加工后主动测量是指紧接在加工工序完毕后﹐在(或不在)加工设备上全部或抽样测量有关几何参数﹐并立即按测量所得信息调整加工条件﹐以不断加工出合格工件。主动测量把测量和加工过程结合在一起﹐能保证工件的精度和提高生產效率﹐预防废品﹐是一种积极的测量方法﹐故也称积极测量。
简史 20世纪30年代起﹐首先在汽车和轴承製造中应用主动测量。初期使用的是单点式和三点式主动量仪﹐採用百分錶作为指示部分。40年代起﹐由於电感式长度传感器和气动量仪的发展﹐开始应用两点式主动量仪。自60年代至70年代初期﹐磨床主动测量在大量生產中得到较广泛应用。70年代以后﹐由於数字控制机床等的发展﹐出现了採用光栅﹑感应同步器等测量系统的大量程主动测量。同时﹐激光测长技术也开始在主动测量中应用。
加工中主动测量 常用於磨削和珩磨加工中﹐主要有测轴﹑测孔和配磨主动测量。
测轴主动测量有两种。图1 三点式主动量仪测轴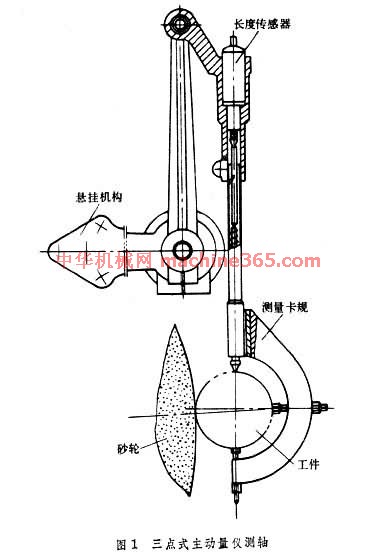 为利用三点式主动量仪测轴﹐常用於普通外圆磨床上。测量时﹐用手把悬掛在外圆磨床砂轮罩上的三点式主动量仪的测量卡规卡在工件上﹐工件在磨削过程中的尺寸变化通过中继测杆由长度传感器转换为电信号﹐操作者根据指示表(图 三点式主动量仪测轴 中未表示)所示量值控制进给量(见切削用量)﹐直至达到预定尺寸。图2 两点式主动量仪测轴及配磨主动测量
为利用三点式主动量仪测轴﹐常用於普通外圆磨床上。测量时﹐用手把悬掛在外圆磨床砂轮罩上的三点式主动量仪的测量卡规卡在工件上﹐工件在磨削过程中的尺寸变化通过中继测杆由长度传感器转换为电信号﹐操作者根据指示表(图 三点式主动量仪测轴 中未表示)所示量值控制进给量(见切削用量)﹐直至达到预定尺寸。图2 两点式主动量仪测轴及配磨主动测量  中测轴部分为两点式主动测量的工作原理。测量装置由液压系统或伺服电机操纵自动进入测量位置﹐把磨削过程中工件尺寸变化通过安装在其中的长度传感器转换为电信号﹐输入控制指示仪控制进给量直至达到预定尺寸﹐并控制测量装置自动退出测量位置。
中测轴部分为两点式主动测量的工作原理。测量装置由液压系统或伺服电机操纵自动进入测量位置﹐把磨削过程中工件尺寸变化通过安装在其中的长度传感器转换为电信号﹐输入控制指示仪控制进给量直至达到预定尺寸﹐并控制测量装置自动退出测量位置。
简史 20世纪30年代起﹐首先在汽车和轴承製造中应用主动测量。初期使用的是单点式和三点式主动量仪﹐採用百分錶作为指示部分。40年代起﹐由於电感式长度传感器和气动量仪的发展﹐开始应用两点式主动量仪。自60年代至70年代初期﹐磨床主动测量在大量生產中得到较广泛应用。70年代以后﹐由於数字控制机床等的发展﹐出现了採用光栅﹑感应同步器等测量系统的大量程主动测量。同时﹐激光测长技术也开始在主动测量中应用。
加工中主动测量 常用於磨削和珩磨加工中﹐主要有测轴﹑测孔和配磨主动测量。
测轴主动测量有两种。图1 三点式主动量仪测轴
为利用三点式主动量仪测轴﹐常用於普通外圆磨床上。测量时﹐用手把悬掛在外圆磨床砂轮罩上的三点式主动量仪的测量卡规卡在工件上﹐工件在磨削过程中的尺寸变化通过中继测杆由长度传感器转换为电信号﹐操作者根据指示表(图 三点式主动量仪测轴 中未表示)所示量值控制进给量(见切削用量)﹐直至达到预定尺寸。图2 两点式主动量仪测轴及配磨主动测量 中测轴部分为两点式主动测量的工作原理。测量装置由液压系统或伺服电机操纵自动进入测量位置﹐把磨削过程中工件尺寸变化通过安装在其中的长度传感器转换为电信号﹐输入控制指示仪控制进给量直至达到预定尺寸﹐并控制测量装置自动退出测量位置。 说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条