|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
1) path tracking

路径跟踪
1.
AGV with clutch steering technology and its path tracking control;
基于离合器转向的AGV及路径跟踪控制器设计
2.
A new path tracking control strategy for mobile robot;
一种新的移动机器人路径跟踪控制策略
3.
Singular path tracking algorithm for non-redundant robot manipulators;
非冗余机械臂奇异路径跟踪算法
2) path following
路径跟踪
1.
Observer-based path following control of wheeled mobile robots;
基于观测器的轮式移动机器人路径跟踪控制
2.
Research on path following of underwater vehicle without rudder and fin;
无舵翼水下机器人路径跟踪控制研究
3.
Reactive power optimization of power system based on path following interior method;
基于路径跟踪内点法的电力系统无功优化
3) road following
路径跟踪
1.
The present research situation of mobile robot is analyzed and summarized including its computer control system,information fusion of multi-sensors,environment recognition,robot vision,road following and intelligent control.
对智能移动机器人的计算机控制系统、多传感器信息融合、环境识别、机器人视觉、路径跟踪以及智能控制等的研究现状进行了较为详细地分析和综述。
2.
By imitating the preview driving behavior of human, an effective intelligent preview control method for mobile robot road following was developed.
本文首先介绍了移动机器人的基本硬件组成 ,然后模仿人工预瞄驾驶行为 ,提出了一种移动机器人路径跟踪的智能预瞄控制方法 ,并介绍了智能预瞄控制器的原理、结构及其设计过程 。
3.
In this paper, the relationship among three deviations produced in mobile robot road following is investigated, and a new two sub fuzzy controllers based correct deviations method is advanced.
本文在分析移动机器人在路径跟踪中所产生的3种误差之间关系的基础上,提出了基于两个模糊子控制器的移动机器人路径跟踪纠偏的新方法。
4) Path tracing
路径跟踪
5) track path
跟踪路径
6) path-following method
路径跟踪法
1.
This paper presents a path-following method for a class of nonmonotonic linear complementary problems, and discusses its computational complexity.
在文[21的基础上,本文给出了当 M为 P矩阵时求解问题(1)的一种路径跟踪法,并讨论了该算法的计算复杂性。
2.
To improve rolling horizon optimization of multivariable constrained predictive control, path-following method and particle swarm optimization have been studied and a class of mixed iterative arithmetic composed of both is proposed.
为了改进多变量约束预测控制的滚动优化算法,对路径跟踪法和粒子群算法进行了理论研究,提出了一种将路径跟踪法和粒子群算法相结合的混合迭代算法,并用该混合算法对最具代表性的动态矩阵控制进行了滚动优化。
补充资料:Pro/ENGINEER中复杂几何路径的数组阵列
1 引言 Pro/ENGINEER是目前应用非常广泛的CAD/CAM软件,其功能非常强大。在Pro/ENGINEER中进行特征复制时, PATTERN(数组阵列)可以一次建立多个相同的特征,比COPY(复制)省时省力。 在实际应用中,阵列的几何路径有规则的(如直线形、圆形等),也有不规则的(如平行四边形、椭圆形等)。对于规则路径,其生成较简单,如圆形路径,选取一周向驱动尺寸,输入阵列的增量与个数即可。下面以在基座上钻孔为例,介绍不规则几何路径的数组阵列。 2 设计实例 首先,生成基座(如图1黑点表示孔的圆心位),其中心点位于Pro/ENGINEER中坐标系的原点,再钻出左上角的第一个孔(以基座的两条边为参考边,这两条边的交点为准原点)。然后进行数组阵列,产生其余的孔,依次选择“Pattern→General→Table”。 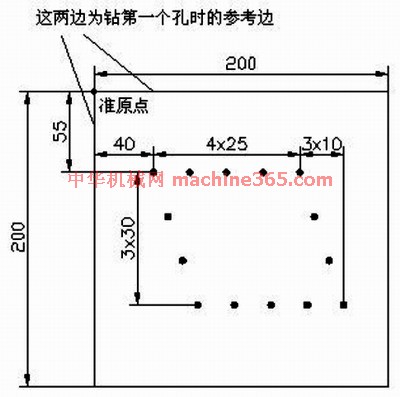
图1 黑点表示孔的圆心位 2.1 步骤一 选择图1中的尺寸“40,55”作为“表格驱动阵列的驱动尺寸”,然后选“Done”。 2.2 步骤二 选择“Add”,进行表的添加(输入一个表名如A),接着打开一个窗口,其中已有的文字均为注释语句,最后一行为: idx d4(40.0) d3(55.0) 其中,idx表示这一列填的是序号,从1开始;d后的数字以实际操作中产生的为准,括号内数值为步骤1中所选驱动尺寸的值,可以看出该值的显示顺序与尺寸的选择顺序是对应的。 2.3 步骤三 进行表的录入,依次填入:
1 65 55
2 90 55
3 115 55
4 140 55
5 50 85
6 60 115
7 70 145
8 95 145
9 120 145
10 145 145
11 170 145
12 150 85
13 160 115 其中1~4为上部右边的4个孔,5~7为左边3个孔,8~11为下部右边4个孔,12~13为右边剩余2个孔。 2.4 步骤四 首先点击“File→Save”,并且进行保存。然后点击“File→Exit”,退出程序。之后执行“Done”即可进行阵列,如图2所示。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|