|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
您的位置: 首页 -> 词典 -> 平面弹性连杆机构
1) Planar elastic linkage

平面弹性连杆机构
2) elastic linkage mechanism
弹性连杆机构
1.
Dynamic analysis of the elastic linkage mechanism based on the artificial neural network;
基于神经网络的弹性连杆机构动力响应分析
2.
The uncertain parameters of elastic linkage mechanism were described as interval variables herein.
将弹性连杆机构的不确定性参数描述为区间变量,分别利用一阶Taylor展开式和基于神经网络的Monte-Carlo模拟法来进行机构动力响应的区间分析,建立了弹性连杆机构的非概率可靠性分析模型;通过数值算例,分别用上述两种区间分析方法对弹性连杆机构的动力响应进行区间分析及非概率可靠性分析。
3.
The coupling dynamic nonlinear equations for a three-phase AC motor and elastic linkage mechanism system were derived,and primary resonance effected by electromagnetic force was analyzed by using the multi-measure method.
建立了三相交流电动机-弹性连杆机构系统的耦合动态方程,用多尺度法分析了该系统在电磁力作用下的主共振现象,得到了该系统的主共振特性与电磁力之间的内在联系。
3) flexible linkage mechanism
弹性连杆机构
1.
Optimization of flexible linkage mechanism with nonuniform cross sections for low acoustic radiation;
低噪声变截面弹性连杆机构的优化设计
2.
It is found that the dynamic characteristics of a time varying vibration system of a flexible linkage mechanism,such as its vibration responce period,its critical speeds and lower order critical speed.
首次进行了2倍于机构运动周期的外力激励情况下弹性曲柄滑块机构的动态特性实验研究,并通过其振动响应周期、临界速度与低阶临界速度等物理现象,发现弹性连杆机构时变振动系统的动力学特性不仅与系统本身的具体结构等有关,而且还与其运动周期及外力激励周期有
4) elastic linkages
弹性连杆机构
1.
With kineto-elastodynamic analysis, the dynamic force analysis and the formulas of shaking force, shaking moment and input torque in elastic linkages are reacerched.
在弹性连杆机构运动动态响应分析的基础上 ,对其受力分析和震动力、震动力矩及输入扭矩的求解进行了研究 ,并把施加“控制力”的思想应用到弹性连杆机构受力分析中 ,得到了一种受力分析的新方法 ,算例结果表明此法是可行的 。
2.
A new method on obtaining steady state dyanmic response of elastic linkages is presented in this paper.
提出了一种求解弹性连杆机构稳态响应的高效方法。
5) flexible linkage mechanisms
弹性连杆机构
1.
This paper presents the applications of neural networks (NN) to the active vibration control of flexible linkage mechanisms whose flexible links are incorporated with piezoceramic actuators and strain gauge sensors.
首次将神经网络理论应用于弹性连杆机构的振动主动控制 ,设计、建造了具有压电陶瓷作动器与电阻应变计传感器的弹性连杆机构实验装置及其振动控制系统。
6) elastic linkage
弹性连杆机构
1.
A method for updating the dynamic finite element model of a elastic linkage using measured eigenfrequencies is proposed.
提出了一种利用实测固有频率数据修正弹性连杆机构有限元动力学模型的方法,该方法的基本原理是利用机构固有频率实测值和有限元计算值的加权误差建立目标函数,然后用优化方法使目标函数极小化,从而识别出机构局部构件结构参数的修正值。
2.
Using the direct differentiation method,a design sensitivity analysis method for the steady state dynamic response of elastic linkages is developed.
采用直接微分法得到了一种弹性连杆机构稳态动力响应灵敏度的计算方法,该方法克服了用差分法计算灵敏度存在的截断误差和舍入误差较大、计算精度低的缺点,是一种精确有效的弹性连杆机构稳态动力响应灵敏度计算方法。
3.
But the researches on vibration characteristics of motor-driven elastic linkage systems have shown that the dynamic responses of linkage systems are nonlinear and multi-modality.
然而,弹性连杆机构的非线性振动特性研究表明,机构的动态响应特性十分复杂,并且在一定条件下会产生超谐共振、亚谐共振、多重共振、组合共振等非线性振动行为,这些共振就会对以机构动态性能为目标的优化设计产生重要影响,而使优化设计工作常常只能得到一个局部最优值,甚至只是一个比初始设计略微好些的设计点。
补充资料:机械原理:平面连杆机构
由若干个刚性构件通过低副(转动副﹑移动副)联接﹐且各构件上各点的运动平面均相互平行的机构(图1 平面连杆机构示例 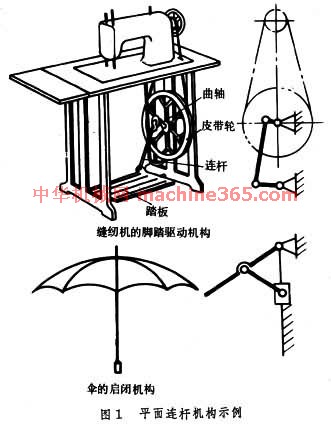 )﹐又称平面低副机构。低副具有压强小﹑磨损轻﹑易於加工和几何形状能保证本身封闭等优点﹐故平面连杆机构广泛用於各种机械和仪器中。与高副机构相比﹐它难以準确实现预期运动﹐设计计算复杂。 )﹐又称平面低副机构。低副具有压强小﹑磨损轻﹑易於加工和几何形状能保证本身封闭等优点﹐故平面连杆机构广泛用於各种机械和仪器中。与高副机构相比﹐它难以準确实现预期运动﹐设计计算复杂。
平面连杆机构中最常用的是四杆机构﹐它的构件数目最少﹐且能转换运动。多於四杆的平面连杆机构称多杆机构﹐它能实现一些复杂的运动﹐但杆多且稳定性差。
曲柄存在条件 动力机的驱动轴一般整周转动﹐因此机构中被驱动的主动件应是绕机架作整周转动的曲柄在形成铰链四杆机构的运动链中﹐a﹑b﹑c﹑d既代表各杆长度又是各杆的符号。当满足最短杆和最长杆之和小於或等於其他两杆长度之和时﹐若将最短杆或其邻杆固定其一﹐则另一杆即为曲柄。
急回係数 在曲柄等速运动﹑从动件变速运动的连杆机构中﹐要求从动件能快速返回﹐以提高效率。即

k 称为急回係数。
压力角 如图2a 铰链四杆机构 中的曲柄摇杆机构﹐若不计运动副的摩擦力和构件的惯性力﹐则曲柄a通过连杆b作用於摇杆c上的力P ﹐与其作用点B 的速度之间的夹角称为摇杆的压力角。压力角越大﹐P 在方向的有效分力就越小﹐传动也越困难﹐压力角的餘角称为传动角。在机构设计时应限制其最大压力角或最小传动角。
死点 在曲柄摇杆机构中﹐若以摇杆为主动件﹐则当曲柄和连杆处於一直线位置时﹐连杆传给曲柄的力不能產生使曲柄迴转的力矩﹐以致机构不能起动﹐这个位置称为死点。机构在起动时应避开死点位置﹐而在运动过程中则常利用惯性来过渡死点。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|