1) augmented matrix model

增广矩阵模型
2) augmented matrix
增广矩阵
1.
In the proposed algorithm by means of singular value decomposition (SVD) of a new augmented matrix and by use of a simple and practical method to deter.
通过分析噪声误差,提出采用奇异值总体最小二乘(singularvaluedecompositiontotalleastsquares,SVDTLS)算法进行间谐波频率估计,即同时考虑矩阵方程两边的噪声干扰,采用SVDTLS算法求解该情况下的最小范数解,通过对增广矩阵进行奇异值分解(singularvaluedecomposition,SVD),采用简单实用的与信噪比相关的主奇异值个数确定方法对分解的右奇异矩阵进行存储计算,得到了较精确的间谐波频率估计结果。
2.
Propagation properties of high-order Bessel-Gaussian beam through a misaligned first-order ABCD system have been studied by using the generalized Huygens-Fresnel diffraction integral and augmented matrix.
使用广义惠更斯-菲涅耳衍射积分和增广矩阵,研究了Bessel-Gaussian光束通过失调一阶ABCD系统的传输特性。
3.
This paper introduces an improving method of the augmented matrix and the principal propram flow chart.
介绍了一种改进的增广矩阵法和主要的程序流程图 ,可用于线性控制系统的数字仿真 ,特别适用于病态系统。
3) Generalized BCG Matrix Model
广义BCG矩阵模型
1.
Based on the Fuzzy Comprehensive Evaluation Method and the Generalized BCG Matrix Model,an individual enterprise s execution of shope management level and its trend is analyzed to find out the reason behind the shope management level s difference.
本文指出了现场管理执行力的重要性,设计了评价现场管理执行力的指标体系,并以模糊综合评价法和广义BCG矩阵模型对具体企业的生产现场管理执行力水平及其变化趋势进行了分析,找出了执行力水平差异背后的原因。
4) matrix-gain model
矩阵增益模型
5) MEMP
增广矩阵束
1.
Azimuth/elevation angle estimation based on MEMP method;
基于增广矩阵束的方向角与仰角估计
6) augmented matrix algorithm
增广矩阵法
1.
For the digital simulation of a class of nonlinear continuous control system includ-ing a typicaI nonlinear block,based on the generalized augmented matrix algorithm,a newsimulation method has been proposed by establishing equivalent linear models of the simula-ed system sectionally.
对于一类含有一个典型非线性环节的非线性连续控制系统的数字仿真,基于广义增广矩阵法的原理,通过分段建立等效线性化模型,给出了一种新的仿真方法。
2.
Using polynomial interpolating function to approximate the, system input and introducing the result obtained with augmented matrix algorithm, a fast simulation algorithm based on discrete analog method is presented in this paper.
考虑线性定常系统的数字仿真,状态变量的计算步长为T,而系统输出的计算间隔常常为NT,本文通过以多项式插值函数逼近系统输入,利用增广矩阵法的结果,给出了基于离散相似法的一类仿真算法,当N较大时,与一般同类算法相比,本文算法使计算量显著减小。
3.
For the simulation of linear time-invariant system, the augmented matrix algorithm is of high accu-racy and speed.
对于线性定常系统的数字仿真,增广矩阵法是一种高精度快速算法。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
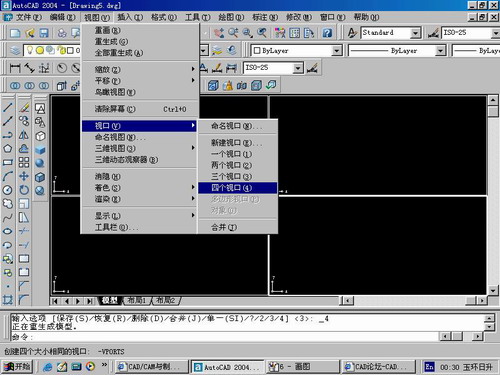
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
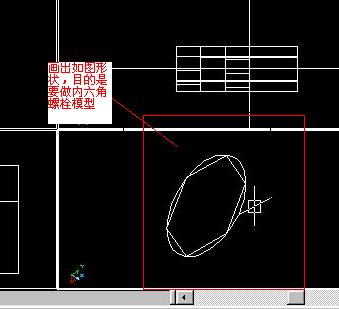
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
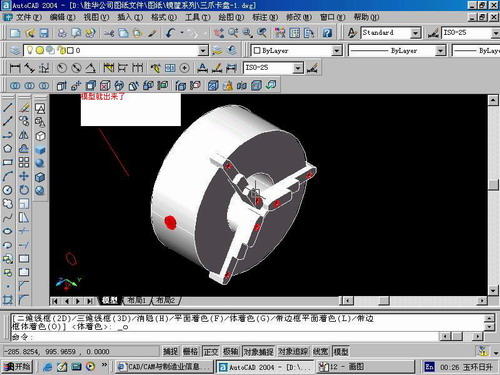
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条