1) S-curve velocity planning

S形速度规划
1.
An S-curve velocity planning algorithm based on the limits of actuator space was presented.
利用并联机构的动力学模型,对机构在笛卡儿坐标中基于驱动器空间限制的速度规划算法进行了研究,提出了基于驱动器空间限制的S形速度规划算法。
2) S-Shape A/D
S曲线速度规划
3) trapezoidal velocity planning
梯形速度规划
4) velocity planning
速度规划
1.
Micro line blocks velocity planning based on bidirectional scan algorithm
基于双向扫描算法的小线段速度规划
2.
The marking software can do full-scale velocity planning,jumping path optimization and fine interpolation at real-time under the DDA period of 20μs.
分析了加速度和空行程对激光打标机性能的影响,提出了一种基于流水线架构的高性能激光打标机软件体系结构,它以20μs的精细插补周期进行实时插补,并通过全局速度规划、空行程优化等方法在确保标刻质量的前提下显著提高了标刻速度。
3.
Velocity planning for curved path interpolation in high CNC machining should be bounded by both dynamic properties of the machine tool and the geometrical properties of the curved path.
参数曲线高速数控插补时,进给速度规划需要综合考虑机床动力学特性和曲线几何特征的限制。
5) planning speed
规划速度
6) S curve of speed
S形速度曲线
1.
This stroke control system have functions of automatic formation of S curve of speed,speed presetting and speed supervision and controlling.
此行程控制系统具有S形速度曲线自动形成、预置速度给定值、速度监视与控制功
补充资料:速度
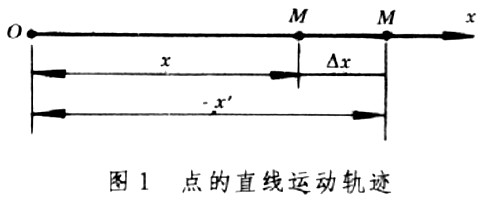
| 速度 velocity 描述动点在某瞬时位置变化率的矢量。记为v。速度的量纲是LT-1,它的SI单位为米/秒(m/s)。 ①点在直线运动中的速度。设动点在某一参考系中的轨迹是直线,令坐标轴Ox与该直线重合(图1),则每一时刻点的位置M可用它的坐标x表示(x是时间t的函数)。设点在时刻t和t′的位置分别为M和M′,相应的坐标为x和x′,则Δx=x′-x表示点在Δt=t′-t这段时间走过的距离。比值  表示点在Δt时间内位置的平均变化率,称为平均速度 。当Δt趋于零时,平均速度的极限称为点在时刻t的速度,简称速度,记为v,可视为代数量。 表示点在Δt时间内位置的平均变化率,称为平均速度 。当Δt趋于零时,平均速度的极限称为点在时刻t的速度,简称速度,记为v,可视为代数量。 。当v>0时,点沿Ox轴正方向运动;v<0时,则沿Ox轴负方向运动。 。当v>0时,点沿Ox轴正方向运动;v<0时,则沿Ox轴负方向运动。
②点在曲线运动中的速度。设点在某一参考系(如直角坐标系Oxyz,图2)中的轨迹是一条空间曲线,点的运动方程为r=r(t),r 表示时刻t点在轨迹上的位置M的矢径,它是随时间而变化的。设在瞬时t′,点在轨迹上的位置为M′,矢径为r′,Δr=r′-r表示点在Δt时间内的位移矢量,则  是点在曲线运动中瞬时t的速度,其大小为 是点在曲线运动中瞬时t的速度,其大小为 的模,其方向沿Δr的极限方向,也即沿轨迹在M点的切线方向。令vx、vy、vz和x、y、z分别表示点在时刻t的速度v和矢径r在各坐标轴上的投影,则 的模,其方向沿Δr的极限方向,也即沿轨迹在M点的切线方向。令vx、vy、vz和x、y、z分别表示点在时刻t的速度v和矢径r在各坐标轴上的投影,则 ,式中v是速度的模,称为速率;s是由运动轨迹上的某定点M0量至M点的弧长。速度v的方向可由它与各坐标轴夹角的方向余弦决定。 ,式中v是速度的模,称为速率;s是由运动轨迹上的某定点M0量至M点的弧长。速度v的方向可由它与各坐标轴夹角的方向余弦决定。
③速度的合成。点的速度随所选择的参考系而变化。在点的复合运动中,动点相对静止参考系的速度称为绝对速度;动点相对运动参考系的速度称为相对速度。若把动点的绝对运动视为由它相对运动参考系的运动(相对运动)和运动参考系带着它走的运动(牵连运动)所组成,则某瞬时动参考系上与动点重合的那个点相对静止坐标系的速度称为动点的牵连速度。动点的绝对速度等于其相对速度和牵连速度的矢量和,这就是速度合成定理。 |

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条