|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
1) software lock

软件锁
2) Interlocking Software
联锁软件
1.
Modeling for interlocking software using unified modeling language and Petri net;
联锁软件的统一建模语言和Petri网建模
2.
Since the interlocking software is critical in ensuring the run-time safety of train or locomotive,sufficient test is very important for it.
联锁软件是保障铁路车站列车或机车(以下简称列机车)作业安全的关键软件,充分的测试对于保证其安全性具有举足轻重的作用。
3.
At present, railway station computer interlocking software test platform includes automatic test and manual test.
目前,铁路车站计算机联锁软件测试平台包含自动测试和人工测试。
3) software phase lock loop
软件锁相
1.
The synchronization of current reference and net voltage is well achieved by adopting the combination of hardware phase lock loop and software phase lock loop.
分析讨论了多模块化PWM变流器实现的多重化大功率有源电力滤波器的结构、原理以及对控制系统的要求,根据其特点设计了基于双DSP的数模混合控制系统,给出了控制系统硬件结构以及软件实现,采用软件锁相和硬件锁相相结合的方式有效地解决了同步问题,并针对有源滤波器应用中的一些具体问题给出了软件解决方案。
4) Software code
软件密锁
5) software pLL
软件锁相环
1.
Research on Method of Parallel Software PLL;
软件锁相环并行化方法研究
2.
Provided the Z domain model of the software PLL, discussed an implementation method in the case of multirate system Frequency and phase curves is simulation analyzed based on Matlab,introduced a SPLL example based on DS
在分析软件锁相环的 Z域模型基础上 ,阐述了在多速率条件的实现方法 ,仿真出软件锁相环频率与相位跟踪曲线 ,介绍了一种基于 DSP的软件锁相环实
6) SPLL
软件锁相环
1.
SPLL simulation of the frequency-measurement project in a unified S-Band TT&C system
统一S波段测控系统中软件锁相环的测速方案仿真
2.
The paper researches electrical model of ultrasonic transducer, through the discussion of phase-locked control principles of ultrasonic power supply, phase- locked control system mathematical model of ultrasonic power supply was established, analyzes the stability of the model and draw the stable condition of the Soft-ware Phase-Locked Loop (SPLL) algorithm.
讨论了压电超声换能器的电学模型,从超声电源锁相控制的原理出发,建立了超声电源锁相控制系统的数学模型并进行了稳定性分析,得到了软件锁相环(Soft-warePhase-LockedLoop,简称SPLL)算法的稳定条件。
3.
Based on the transformation of synchronous coordinate transformation and SPLL,this paper proposes a single-phase voltage sag detection method.
本文基于同步坐标变换及软件锁相环(SPLL),提出了一种单相电压凹陷检测方法。
补充资料:利用UG软件后置处理由MAX-5软件生成的刀位文件
MAX-5是叶轮专用的编程软件,UG则是在国内应用较广的CAD/CAM系统。MAX-5后置处理的通用性较差,而UG则具有灵活的后置处理功能,本文作者将二者巧妙地结合在了一起,不仅实现了二者的优势互补,而且为成功解决生产中遇到的实际问题开拓了思路。
一、前言
对于直纹面叶轮的5轴铣削加工,熟悉的人都清楚叶轮专用编程软件MAX-5有着明显的优势。该软件加工轨迹的定义方式丰富、刀具选择面广,加工效果非常好。但由于是专用软件,它的后置处理程序是由软件公司根据实际机床结构编写的,不具有通用性和可编辑性。实际的工作中,我们可能会碰到各种不同运动关系和结构的机床,是否可以提取MAX-5生成的刀位文件而通过其他的软件去实现灵活后置呢?如果这样的方式能够实现,将带给我们极大的方便,同时也增强了MAX-5软件的适应性。 UG是一款高端的一体化软件,其CAM功能中的可变轴铣削方式就能够实现多轴加工。同时该软件还有一个很大的好处,它对自身的刀位文件可以灵活地后置,通过用户定义的后置处理程序就可生成实际机床所需的代码文件。由此,我们尝试通过UG软件去后置MAX-5软件生成的刀位文件,并成功地在双旋转工作台5轴机床上得以实现。本文就该方式的具体实现过程介绍如下。 二、UG软件多轴加工后置处理程序的用户自定义 UG软件中的Post-Builder是提供给用户定制后置处理程序的功能模块。该模块如图1所示,不仅可以对程序结构和代码进行定义,同时也可以对机床的运动关系进行定义,这就为我们创造了条件。在这里,考虑多轴加工的后置,我们主要介绍定义机床的运动关系部分,其余的不作叙述。 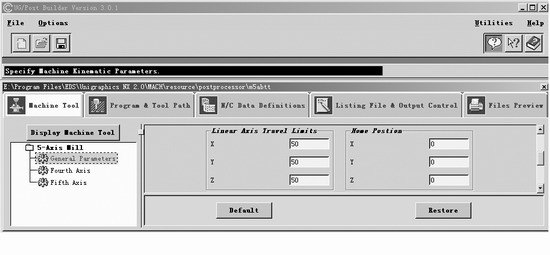
图1 UG的Post-Builder功能模块 先探讨一下UG软件提供的机床定义功能。如图2所示,在Create New Post Processor界面里,机床的定义包括了所有的5轴运动关系,这里需要定义与实际相符的机床运动关系,在本文中定义为5-Axis with Dual Rotary Tables方式,然后明确其他选项,进入后续的定置。在5—Axis Mill的定义中 ,有General Parameters 、Fourth Axis、Fifth Axis共三个部分需要定义,可参照UG的培训教程,这里不作详述。如图3所示,值得注意的是各旋转轴同机床零点之间的相互几何关系和各旋转轴的旋转角度偏移定义,对于后置处理的正确性影响较大。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|