|
|
|
说明:双击或选中下面任意单词,将显示该词的音标、读音、翻译等;选中中文或多个词,将显示翻译。
|
|
|
1) recognizable path of minimal accumulated height difference

可识别路径
2) path identification
路径识别
1.
The parametric network model is established on the basis of precise path identification.
利用支撑树理论确定路网中需添加标识站的位置和数量,在实现准确路径识别的基础上建立参数化路网模型,给出了网状路网下基于矩阵运算的通行费精确清分算法。
2.
According to the characteristics of networking toll expressways,a path identification method based on probability analysis was proposed.
根据高速公路联网收费的特点,提出了一种基于概率分析的路径识别方法。
3) path recognition
路径识别
1.
The Design of Path Recognition Image Sensor Based on FPGA;
基于FPGA的路径识别图像传感器的设计
2.
In order to improve the adaptability of the vision navigation system to various environments for the agricultural vehicles,the influence of the complicated environment on the path recognition was investigated.
为提高农用车辆视觉导航系统对不同环境的适应性,研究了田间地头、天空以及树木等复杂环境对路径识别的影响。
3.
AGV vision-guided control technology involves two key aspects of path recognition and track.
路径识别和路径跟踪是AGV视觉导引控制中的 2个关键问题 ,本文利用颜色信息识别路径 ,采用模糊控制策略跟踪路径 ,系统的鲁棒性高 ,同时也兼顾了系统的实时性要求。
4) route recognition
路径识别
1.
Combining with actual state and development trend of route recognition technology under the condition of network tolling,taking the route recognition of hengyang-shaoyang highway for example,the idea and the solve scheme of route recognition has been put forward,which has some practical significance.
结合联网收费环境下现有路径识别技术现状及发展趋势,以衡阳至邵阳高速公路路径识别为例,提出路径识别问题的解决思路和此环路的解决方案,具有一定的实际意义。
2.
This system uses CCD camera as its route recognition device,extracts its route information through image recognition,uses the minimum square fitting method to judge the current track information,adjusts steering angle by using fuzzy control method,controls the DC motor through the speed of fuzzy set methods.
设计了一种能路径识别与智能跟踪的单片机控制智能小车系统。
3.
How to precisely obtain route information in the system of route recognition is critical.
在路径识别系统中,如何准确地获取路径信息是一个关键,通常可采用光电管或CCD传感器,以在智能运动小车中的应用为例,介绍了CCD路径识别系统的设计过程,相对于光电管,CCD摄像头具有分辨率高、功耗低、前瞻性好等优点,从而可以获取更多的路径信息。
5) Road recognition
路径识别
1.
In this paper, an algorithm of road recognition is introduced, which is a key technology for the visual guidance in the non-structured agriculture environment.
针对导航视觉系统采集的农田非结构化自然环境彩色图像 ,探讨了用于行走路径识别的适宜的彩色特征 ,并结合农田作业时农业机器人行走路径的特点 ,运用路径知识启发机制识别出行走路径。
2.
The paper has focused on the algorithms for vision based automated guidance system, which included algorithms of field road recognition, stereovision-based field environment.
田间车辆的自动导航技术是一个首先需要解决的基础问题,本文研究的主要内容是基于机器视觉的田间自动导航系统,包括田问路径识别算法、基于立体视觉的田间环境3D重构方法和自动导航方法、车辆姿态估计算法,具体如下: 1) 按照生物机器人概念构建田间导航平台。
6) Identifying path
识别路径
补充资料:Pro/ENGINEER中复杂几何路径的数组阵列
1 引言 Pro/ENGINEER是目前应用非常广泛的CAD/CAM软件,其功能非常强大。在Pro/ENGINEER中进行特征复制时, PATTERN(数组阵列)可以一次建立多个相同的特征,比COPY(复制)省时省力。 在实际应用中,阵列的几何路径有规则的(如直线形、圆形等),也有不规则的(如平行四边形、椭圆形等)。对于规则路径,其生成较简单,如圆形路径,选取一周向驱动尺寸,输入阵列的增量与个数即可。下面以在基座上钻孔为例,介绍不规则几何路径的数组阵列。 2 设计实例 首先,生成基座(如图1黑点表示孔的圆心位),其中心点位于Pro/ENGINEER中坐标系的原点,再钻出左上角的第一个孔(以基座的两条边为参考边,这两条边的交点为准原点)。然后进行数组阵列,产生其余的孔,依次选择“Pattern→General→Table”。 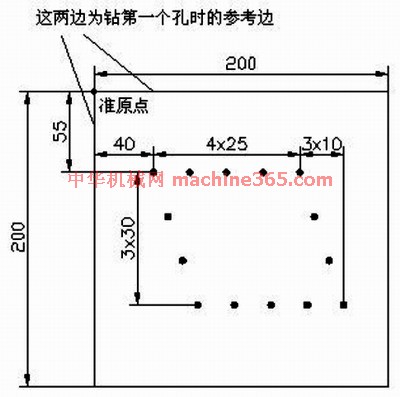
图1 黑点表示孔的圆心位 2.1 步骤一 选择图1中的尺寸“40,55”作为“表格驱动阵列的驱动尺寸”,然后选“Done”。 2.2 步骤二 选择“Add”,进行表的添加(输入一个表名如A),接着打开一个窗口,其中已有的文字均为注释语句,最后一行为: idx d4(40.0) d3(55.0) 其中,idx表示这一列填的是序号,从1开始;d后的数字以实际操作中产生的为准,括号内数值为步骤1中所选驱动尺寸的值,可以看出该值的显示顺序与尺寸的选择顺序是对应的。 2.3 步骤三 进行表的录入,依次填入:
1 65 55
2 90 55
3 115 55
4 140 55
5 50 85
6 60 115
7 70 145
8 95 145
9 120 145
10 145 145
11 170 145
12 150 85
13 160 115 其中1~4为上部右边的4个孔,5~7为左边3个孔,8~11为下部右边4个孔,12~13为右边剩余2个孔。 2.4 步骤四 首先点击“File→Save”,并且进行保存。然后点击“File→Exit”,退出程序。之后执行“Done”即可进行阵列,如图2所示。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条
|