1) Model attitude measurement

模型姿态测量
2) attitude measurement
姿态测量
1.
An exterior attitude measurement system for spatial object based on linear CCD;
应用线阵CCD的空间目标外姿态测量系统
2.
Research on mini-type and portable ship attitude measurement system;
小型便携式船舶姿态测量系统研究
3.
Study on technology of detecting deep underground pipelines with small diameter based on the attitude measurement
基于姿态测量的深埋小口径地下管道探测技术研究
3) attitude determination
姿态测量
1.
Research on algorithm of GPS attitude determination in dam;
使用GPS对大坝进行姿态测量的研究
2.
MEMS multi-sensor attitude determination system based on the EKF;
基于EKF的多MEMS传感器姿态测量系统
3.
Review on GPS attitude determination;
GPS姿态测量技术综述
4) attitude measure
姿态测量
1.
In this article, authors introduce data-getting methods of a shield attitude measure system composed of laser target, total station and PLC, and state calculation methods to get coordinates and angles of the shield machine with these measure data.
介绍了利用激光标靶、全站仪和PLC构成盾构姿态测量系统获得测量数据的方法,利用这些测量数据求取盾构机的坐标位置和角度的算法,通过与隧道设计曲线的比较得到盾构机在水平方向和垂直方向上的位置和角度偏差值,使操作人员可以通过这些结果控制盾构机的掘进操作。
2.
The feasibility of vessel attitude measure using BeiDou-2 system is discussed in this paper.
讨论了利用北斗二代卫星定位系统进行舰船姿态测量的可行性,并利用多频观测进行电离层折射误差的消除;使用TCAR和矩阵变换法进行模糊度的解算;最后利用姿态矩阵的正交特性进行模糊度有效性的分析。
5) model attitude
模型姿态
1.
Aiming at the high control performance of the model attitude system in NF-6 wind tunnel, a type of self-adjusted PID control strategy based on BP NN is put forward, and there is farther analysis and improvement combining with improved PID algorithm.
针对NF-6风洞对模型姿态系统控制性能提出的高要求,提出了一种BP网络自整定PID控制策略,并结合现有的改进型PID控制思想对其进行了进一步的分析与改进。
6) model gesture
模型姿态
1.
Design of model gesture control system of a certain wind tunnel based on Microprocessor;
基于单片机的风洞模型姿态控制系统设计
2.
This paper introduces composition of the kind of control system of model gesture in low speed wind-tunnel.
主要介绍了一种低速风洞模型姿态控制系统的组成。
3.
The model gesture equipment is the core device of this technique.
该项技术的核心设备是模型姿态装置,该装置原有的控制系统电子元件老化、可靠性降低,已不能满足型号试验的需求,研制新的控制系统迫在眉睫。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
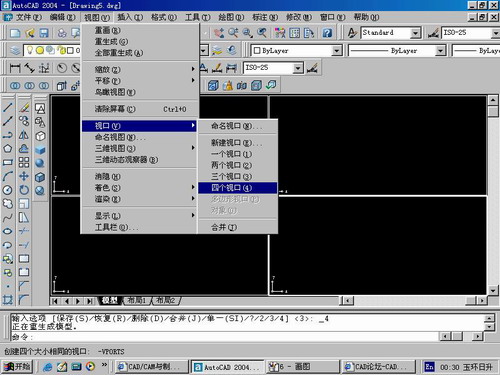
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
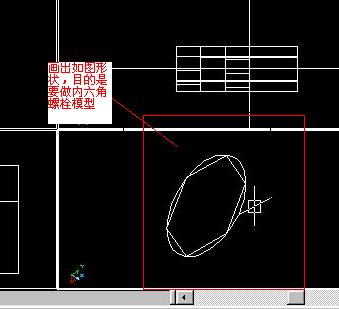
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
第九步:阵列
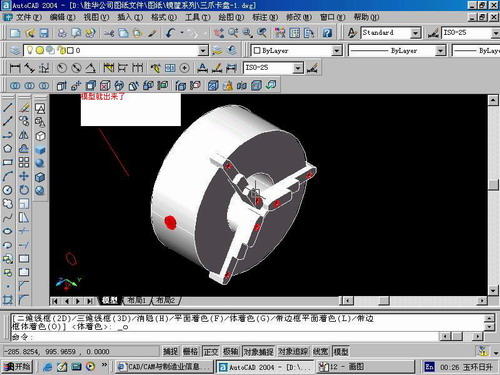
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条