2) FOG
[英][fɔɡ] [美][fɔg]

光纤陀螺仪
1.
Model identification method based on SVM for FOG;
SVM在光纤陀螺仪模型辨识中的应用
2.
Data acqusition of FOG s temperature with FPGA/CPLD;
基于FPGA/CPLD的光纤陀螺仪的温度信号采集
3.
Modeling technology for null drift of FOG;
干涉型光纤陀螺仪零漂建模方法
4) fiber optic gyroscope
光纤陀螺仪
1.
In the course of FOG development,firstly open-loop fiber optic gyroscope was used in tactical and commercial application,and later it was developed into all-digital closed loop interferential fiber optic gyroscope(IFOG),and gradually applied in navigation-grade inertial system.
光纤陀螺仪是惯性系统中目前发展较快的全固态惯性敏感器。
2.
A novel two-ring-resonantor in parallel combined Rayleigh backscattering fiber optic gyroscope(RBFOG)is proposed based on the single ring scheme.
基于单环后向瑞利散射式光纤陀螺原理,提出了一种双环形腔并联的瑞利后向散射式光纤陀螺仪新结构。
3.
Design and Manufacture of Branch Optic Waveguide Phase Modulator for Fiber Optic Gyroscope;
所以,光纤陀螺仪的研制就越来越成为一个热点。
6) ring laser gyroscope
激光陀螺仪
1.
This paper analyses the relation of scale factor error of mechanically dithered ring laser gyroscope and lock- in or dither depth,simulates by Matlah,validates the conclusion that when input angle velocity is equa] to dither depth that scale factor error is most serious and angle velocity measurement is most.
文中在理论上分析了抖动偏频激光陀螺仪标度因数误差与闭锁阈值、抖动偏频量的关系,并用Matlab 对其关系进行了仿真计算,验证了激光陀螺仪输入角速率在抖动偏频量附近由抖动偏频造成的标度因数非线性最为严重、速率测量误差最大的结论。
2.
To eliminate dynamic lock-in error of Mechanically Dithered ring laser gyroscope,it is desirable to inject a pseudo smooth random noise into the sine wave dither signal.
为了消除抖动偏频激光陀螺仪的动态闭锁误差,需要向正弦抖动信号中注入一具有平稳性的随机噪声,以使抖动幅度随机变化。
3.
To eliminate dynamic lock-in error of mechanically dithered ring laser gyroscope,it is desirable to inject a pseudo smooth random noise into the sine wave dither signal,and the dither amplitude is stochastic,so it can eliminate dynamic lock-in error by time domain average.
为了消除抖动偏频激光陀螺仪的动态闭锁误差,需要向正弦抖动信号中注入具有平稳性的随机噪声,以使抖动幅度随机变化,从而可以通过时域平均来消除动态闭锁误差。
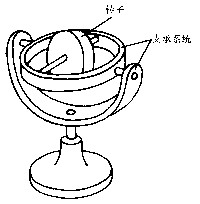
补充资料:陀螺仪
| 陀螺仪 gyroscope 由一个高速旋转转子和保证转子的旋转轴能在空间自由转动的支承系统组成的仪器。简称陀螺,又称回转仪(见图)。陀螺仪是量测载体的方位或角速度的核心元件,利用它的动力学特性制成的各种仪表或装置(见陀螺装置)广泛用于航空、航天、航海的导航系统和稳定装置中。 陀螺仪可根据不同的支承方式分类:由一个或两个框架支承的陀螺仪称为框架陀螺仪;利用静电场或磁场支承的陀螺仪称为静电支承或磁支承陀螺仪;利用液体或气体润滑膜支承的陀螺仪称为液浮或气浮陀螺仪;利用挠性接头支承的陀螺仪称为挠性陀螺仪。也可根据转子旋转轴的不同自由度分为单自由度和双自由度陀螺仪。有些文献将转子的自转自由度也考虑在内,而改称二自由度和三自由度陀螺仪。 陀螺定轴性是陀螺仪沿转子轴的垂直方向无力矩作用时,转子轴在惯性空间中保持指向不变的性质。具有定轴性的陀螺仪称为自由陀螺仪,其指向不变的转子轴可作为物质化了的惯性坐标轴应用于惯性导航系统。高速自转均衡陀螺仪的转子轴具有定轴性。
陀螺旋进是陀螺仪在力矩作用下,其转子轴在惯性空间中产生的偏转方向与力矩矢量方向一致的运动。陀螺旋进常伴随有章动(转子轴在动量矩矢量附近所作的高频微幅圆锥摆动),但振幅极微小且频率极高的章动,由于轴承摩擦和空气阻尼作用而很快衰减,因此在分析具体问题时常忽略陀螺章动,只考虑陀螺旋进。讨论陀螺旋进规律的动力学理论称为旋进理论,是陀螺仪工程理论的主要组成部分,其特点是略去运动微分方程中角度坐标的二阶导数。利用旋进理论可以解释许多重要陀螺仪表的工作原理。 陀螺力矩指在动载体内观察高速旋转转子的运动,当载体的转动迫使转子旋转轴在惯性空间中改变方位时,转子对轴承产生的力矩。此力矩实际上是载体作用于转子的力矩迫使其旋进的反作用力矩,如带螺旋桨的舰船或飞机改变航向时出现的轴承动反力矩。陀螺力矩M的计算公式为M=ω×H,式中ω为载体角速度; H为转子角动量。陀螺力矩也可理解为由于载体转动产生的转子上各点的科里奥利惯性力(见相对运动)相对支承中心的合力矩。利用陀螺力矩可对工程技术中与转动机械有关的动力学现象作定性的物理解释,也可用于动静法建立转动机械的动力学方程。 |
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条