1) fuel handling machine

燃料抓取机
2) fuel handling machine base
燃料抓取机底座
3) fuel pool bridge
燃料抓取机(燃料池桥架)
4) object holding manipulator
物料抓取机械手
1.
In this paper, an economic scheme of robot whole mechanical configuration and control system is provided based on the research and development of robot in recent years and connected with the design of the object holding manipulator.
本论文在综述近年来机器人技术研究和发展状况的基础上,结合物料抓取机械手的设计,对机器人技术进行了系统的分析,提出了整体结构和控制系统经济型设计方案。
5) Grasp mechanism
抓取机制
6) grabber organ
抓取机构
1.
The end-effecter consists of a transmission organ、a cutter organ and a grabber organ.
该末端执行器主要由传动机构、切割机构和抓取机构等几大部分组成,具有节省动力源、结构简单、体积小、质量轻等特点。
补充资料:物料搬运机械:手动葫芦
用人力拉动链条或扳动手柄来提升或牵引重物的轻小型起重设备(见起重机械)。分手拉葫芦和手扳葫芦两种。
手拉葫芦﹕由人力拉动手拉链条﹐通过链轮﹑齿轮带动起重链条而升﹑降重物(图1 手拉葫芦 )。手拉链条和起重链条多半采用圆环链。手拉葫芦带有棘轮﹑棘爪(见棘轮机构)﹐以阻止重物自由下落。起重量一般为0.5~30吨﹐起升高度通常为2.5~3米﹐也可以更大。它可以单独使用﹐也可作为梁式起重机(见桥式起重机)和架空单轨系统中的起升机构。
)。手拉链条和起重链条多半采用圆环链。手拉葫芦带有棘轮﹑棘爪(见棘轮机构)﹐以阻止重物自由下落。起重量一般为0.5~30吨﹐起升高度通常为2.5~3米﹐也可以更大。它可以单独使用﹐也可作为梁式起重机(见桥式起重机)和架空单轨系统中的起升机构。
手扳葫芦﹕又可分为环链式和钢丝绳式两种。环链式手扳葫芦靠扳动手柄﹐通过传动机构带动起重链条升降重物。手扳葫芦齿轮和棘轮棘爪等的结构与手拉葫芦的基本相同。起重量一般不超过3吨﹐起升高度通常为1.5米。人在地面上即可直接扳动手柄﹐操纵重物的升降。空载时吊钩能快速下降以缩短返程时间。钢丝绳式手扳葫芦(图 2 钢丝绳式手扳葫芦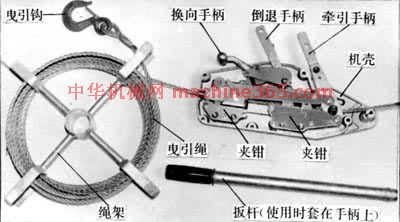 )靠扳动手柄使钢丝绳移动而升降或牵引重物。有甲﹑乙两个夹钳﹐往复扳动手柄时﹐夹钳甲夹紧钢丝绳往后运动﹐同时松开的夹钳乙往前运动。接着﹐夹钳甲松绳往前﹐夹钳乙夹绳往后﹐如此交替动作﹐使钢丝绳牵引的重物随之向操纵者移动或提升。扳动换向手柄到反向位﹐再扳动手柄﹐则夹钳的动作相反﹐使重物反向沿斜面退去或垂直下降。起重量或牵引能力一般在 3吨以下。上述两种手扳葫芦还能斜向和水平牵引重物。
)靠扳动手柄使钢丝绳移动而升降或牵引重物。有甲﹑乙两个夹钳﹐往复扳动手柄时﹐夹钳甲夹紧钢丝绳往后运动﹐同时松开的夹钳乙往前运动。接着﹐夹钳甲松绳往前﹐夹钳乙夹绳往后﹐如此交替动作﹐使钢丝绳牵引的重物随之向操纵者移动或提升。扳动换向手柄到反向位﹐再扳动手柄﹐则夹钳的动作相反﹐使重物反向沿斜面退去或垂直下降。起重量或牵引能力一般在 3吨以下。上述两种手扳葫芦还能斜向和水平牵引重物。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条