1) bipolar cylindrical coordinates

双极柱面坐标
2) cylindrical polar coordinates
柱面极坐标
3) cylindrial polar coordinate system
柱面极坐标系
4) hyperbolic coordinates
双曲柱面坐标
5) cylindrical polar coordinates
柱极坐标
6) cylindrical coordinate
柱面坐标
1.
The parameters of a kind of cylindrical coordinate robot were designed in this paper,according to some qualification.
按照一定的要求对一种柱面坐标机器人进行了参数设计,讨论了该机器人的运动学问题,然后在MATLAB环境下,用Robotics Toolbox对该机器人的正运动学、逆运动学、轨迹规划进行了仿真。
2.
The fractional exterior transition to curvilinear coordinate at the origin were discussed and the two coordinate transformations for the fractional differentials for three_dimensional Cartesian coordinates to spherical and cylindrical coordinates are obtained,respectively.
首先介绍了分数微积分和分数微分形式· 讨论了在原点处对曲线坐标的分数外微分变换,并且获得了从三维卡氏坐标到球面坐标和柱面坐标的两个分数微分变换· 特别地,当v=m=1时,这两个分数微分变换约化的结果与通过外微积分获得的结果是一致的·
3.
The cylindrical coordinate machining(CCM) method was proposed,in which the compensation for tool geometry was considered using vector mathematics.
采用NURBS插补模型进行自由曲面的描述,提出柱面坐标加工模型进行自由曲面超精密车削加工分析,借助矢量数学对刀位点进行刀具参数的优化补偿,并采用螺旋投影驱动方式实现加工路径的规划。
补充资料:极坐标系
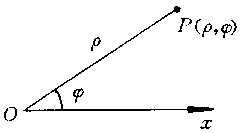
| 极坐标系 polar coordinates 在平面内由极点、极轴和极径组成的坐标系。在平面上取定一点O,称为极点。从O出发引一条射线Ox,称为极轴。再取定一个长度单位,通常规定角度取逆时针方向为正。这样,平面上任一点P的位置就可以用线段OP的长度ρ以及从Ox到OP的角度θ来确定,有序数对(ρ,θ)就称为P点的极坐标,记为P(ρ,θ);ρ称为P点的极径,θ称为P点的极角。当限制ρ≥0,0≤θ<2π时,平面上除极点Ο以外,其他每一点都有唯一的一个极坐标。极点的极径为零 ,极角任意。若除去上述限制,平面上每一点都有无数多组极坐标,一般地 ,如果(ρ,θ)是一个点的极坐标 ,那么(ρ,θ+2nπ),(-ρ,θ+(2n+1)π),都可作为它的极坐标,这里n 是任意整数。平面上有些曲线,采用极坐标时,方程比较简单。例如以原点为中心,r为半径的圆的极坐标方程为ρ=r 等速螺线的方程为  。此外,椭圆 、双曲线和抛物线这3种不同的圆锥截线,可以用一个统一的极坐标方程表示。 。此外,椭圆 、双曲线和抛物线这3种不同的圆锥截线,可以用一个统一的极坐标方程表示。
|
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条