1) MEMS gyroscope

MEMS陀螺仪
1.
Inertia measure using MEMS gyroscope;
基于MEMS陀螺仪的微惯性测量系统的实现
2.
Device level vacuum packaging technologies of MEMS gyroscopes
MEMS陀螺仪器件级真空封装技术
3.
The compensating method for MEMS gyroscope random drift error is discussed.
从工程实用的角度出发,探讨了MEMS陀螺仪随机漂移误差的有效补偿方法。
2) MEMS gyro
MEMS陀螺仪
1.
Research on filter method and model of MEMS gyro static drift;
MEMS陀螺仪静态漂移模型与滤波方法研究
2.
Application of the adaptive kalman filter in the MEMS gyro signal processing;
自适应Kalman滤波在MEMS陀螺仪信号处理中的应用
3.
Based on the analysis of the existing soft threshold and hard threshold wavelet denoising methods,an improved wavelet threshold denoising method is presented which integrated the advantages of the above two methods,and was applied into the filtering process of the MEMS gyro’s signal.
在深入分析现有软阈值和硬阈值小波去噪方法的基础上,综合二者的优点,提出一种模平方小波阈值去噪方法,并将其应用到MEMS陀螺仪输出信号的滤波处理中,从而有效地减小了信号中的高频噪声,提高了信噪比,抑制了MEMS陀螺仪的随机漂移。
3) MEMS Gyroscope
MEMS陀螺
1.
MEMS gyroscope’s error modeling based on wavelet neural network of genetic algorithms;
基于遗传小波神经网络的MEMS陀螺误差建模
2.
Research of De-noise algorithms in MEMS gyroscope based on DSP;
基于DSP的MEMS陀螺去噪算法研究
3.
Data analysis and modeling research of MEMS gyroscope drift;
MEMS陀螺随机误差模型研究
4) MEMS gyro
MEMS陀螺
1.
Duffing-oscillator-based detection of periodic weak signals of MEMS gyro;
基于Duffing振子的MEMS陀螺微弱周期信号检测
2.
Wavelet threshold de-noising for MEMS gyro
一种改进的MEMS陀螺信号去噪方法研究
3.
A low cost scheme of the full attitude detection system composed of magnetometers and MEMS gyroscope was proposed.
文中提出了一种采用磁强计和MEMS陀螺构建低成本姿态探测系统的方案,给出了利用地磁测量、陀螺测量和弹道先验信息解算弹体姿态的算法。
5) MEMS comb linear vibrated gyroscope
MEMS梳状线振动陀螺仪
1.
The damping of the MEMS comb linear vibrated gyroscope includes the configuration damping and the fluid(air) damping.
MEMS梳状线振动陀螺仪阻尼包括结构阻尼和流体(空气)阻尼,而对于此种结构而言,空气黏性阻尼比结构阻尼大的多。
6) MEMS Gyro signal
MEMS陀螺信号
1.
The theory of wavelet transform is used in the processing of the MEMS Gyro signals,and according to two states of the MEMS Gyro, filtering results using the Daubechies(Db) wavelets are analyzed,comparing to the filtering result using a two order IIRfilter.
介绍了小波基本理论,建立了微机械(MEMS)陀螺的数学模型,将小波变换用于MEMS陀螺信号处理,并且在MEMS陀螺的静态和动态两种情况下,分析比较Daubechies小波的滤波效果,并和二阶IIR滤波器的滤波效果进行比较。
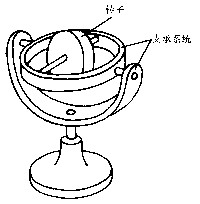
补充资料:陀螺仪
| 陀螺仪 gyroscope 由一个高速旋转转子和保证转子的旋转轴能在空间自由转动的支承系统组成的仪器。简称陀螺,又称回转仪(见图)。陀螺仪是量测载体的方位或角速度的核心元件,利用它的动力学特性制成的各种仪表或装置(见陀螺装置)广泛用于航空、航天、航海的导航系统和稳定装置中。 陀螺仪可根据不同的支承方式分类:由一个或两个框架支承的陀螺仪称为框架陀螺仪;利用静电场或磁场支承的陀螺仪称为静电支承或磁支承陀螺仪;利用液体或气体润滑膜支承的陀螺仪称为液浮或气浮陀螺仪;利用挠性接头支承的陀螺仪称为挠性陀螺仪。也可根据转子旋转轴的不同自由度分为单自由度和双自由度陀螺仪。有些文献将转子的自转自由度也考虑在内,而改称二自由度和三自由度陀螺仪。 陀螺定轴性是陀螺仪沿转子轴的垂直方向无力矩作用时,转子轴在惯性空间中保持指向不变的性质。具有定轴性的陀螺仪称为自由陀螺仪,其指向不变的转子轴可作为物质化了的惯性坐标轴应用于惯性导航系统。高速自转均衡陀螺仪的转子轴具有定轴性。
陀螺旋进是陀螺仪在力矩作用下,其转子轴在惯性空间中产生的偏转方向与力矩矢量方向一致的运动。陀螺旋进常伴随有章动(转子轴在动量矩矢量附近所作的高频微幅圆锥摆动),但振幅极微小且频率极高的章动,由于轴承摩擦和空气阻尼作用而很快衰减,因此在分析具体问题时常忽略陀螺章动,只考虑陀螺旋进。讨论陀螺旋进规律的动力学理论称为旋进理论,是陀螺仪工程理论的主要组成部分,其特点是略去运动微分方程中角度坐标的二阶导数。利用旋进理论可以解释许多重要陀螺仪表的工作原理。 陀螺力矩指在动载体内观察高速旋转转子的运动,当载体的转动迫使转子旋转轴在惯性空间中改变方位时,转子对轴承产生的力矩。此力矩实际上是载体作用于转子的力矩迫使其旋进的反作用力矩,如带螺旋桨的舰船或飞机改变航向时出现的轴承动反力矩。陀螺力矩M的计算公式为M=ω×H,式中ω为载体角速度; H为转子角动量。陀螺力矩也可理解为由于载体转动产生的转子上各点的科里奥利惯性力(见相对运动)相对支承中心的合力矩。利用陀螺力矩可对工程技术中与转动机械有关的动力学现象作定性的物理解释,也可用于动静法建立转动机械的动力学方程。 |
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条