1) in-pipe robot

管内机器人
1.
Key technology in design of in-pipe robot inspecting system;
管内机器人检测系统设计的关键技术
2.
For micro pipes with diameters ranging from 18 to 20mm,a novel creeping micro in-pipe robot is developed,which comprises three DC gear motors and screw driven units.
针对管径为18-20 mm的细小管道,本文研制了一种新型的蠕动式微小管内机器人,采用三组直流减速电机和螺杆传动装置,通过控制三组电机顺序协调动作,实现机器人的蠕动爬行。
2) pipeline inspection robot
管内探伤机器人
1.
The method and principle of autonomous location is presented about a pipeline inspection robot,the results of test and location accuracy meet the requirements of inspection technique.
介绍了一种管内探伤机器人自主定位的方法原理,经检验,其定位精度和效果满足了检测工艺的要求。
3) micro pipe robot
管道内微机器人
1.
A new type of micro pipe robot is introduced.
介绍了一种新型管道内微机器人 ,根据该机器人建立了有摩擦接触的微机器人受限运动的动力学模型 ,用奇异摄动法解释了降阶刚体模型接触力稳定性的附加条件 。
4) in-pipe micro robot
管内移动机器人
1.
A piezoelectric in-pipe micro robot actuated by impact drive mechanism;
惯性冲击驱动管内移动机器人设计(英文)
5) Development of pipeline-inside robot
管内机器人的开发
补充资料:传热学:管内流动
管内流动:
流体在充满管道时的纵向流动﹐简称管流。管流是黏性不可压缩流体动力学的主要研究内容之一。工程上通常要求解决的管流问题﹐是用多大的功率才能使要求的流体流量连续地通过给定直径的管道﹔或者说要求计算管道流动的总水头损失Δ﹐核算体积流量和经济的管道水力直径。
对於黏性不可压缩流体的定常管流﹐常用如下的能量方程来分析 
式中下角标1﹑2表示核算管段的进﹑出口﹐括号中各项依次代表静压水头﹑速度水头和位置水头﹔H 为外界输向流体的机械能水头﹔

和 分别为流动中的局部水头损失和沿程水头损失﹐其中 为管长。局部水头损失反映由於流道变截面或拐弯引起的涡流耗散损失。 称为局部水头损失係数﹐通常由实验确定﹐以经验式或图表给出。沿程水头损失反映流体与管壁间的摩擦损失。 称为沿程水头损失係数﹐由理论和实验方法求得﹐工程上可根据雷诺数(R )和管壁粗糙程度查人工粗糙壁管道和工业管道的沿程阻力係数图(图1 人工粗糙壁管道阻力係数的尼库拉德塞图
分别为流动中的局部水头损失和沿程水头损失﹐其中 为管长。局部水头损失反映由於流道变截面或拐弯引起的涡流耗散损失。 称为局部水头损失係数﹐通常由实验确定﹐以经验式或图表给出。沿程水头损失反映流体与管壁间的摩擦损失。 称为沿程水头损失係数﹐由理论和实验方法求得﹐工程上可根据雷诺数(R )和管壁粗糙程度查人工粗糙壁管道和工业管道的沿程阻力係数图(图1 人工粗糙壁管道阻力係数的尼库拉德塞图 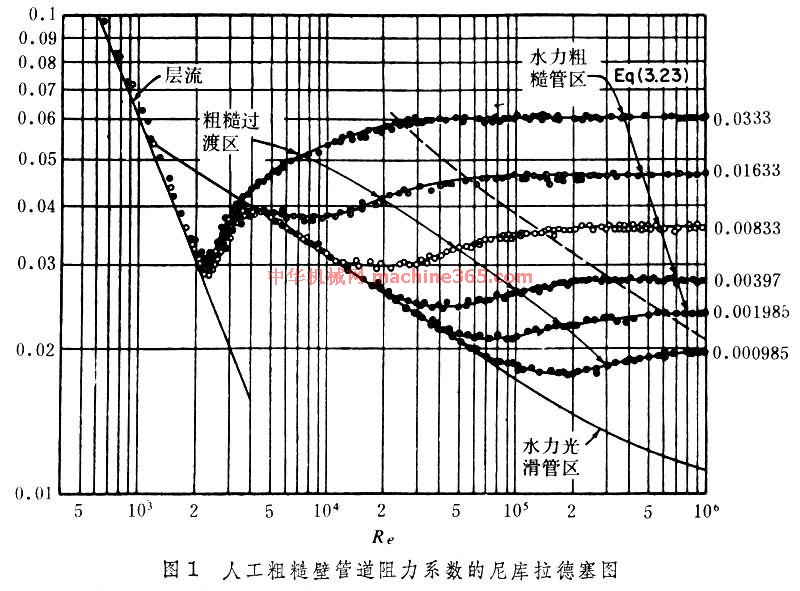 ﹑2 工业管道阻力係数的穆迪图
﹑2 工业管道阻力係数的穆迪图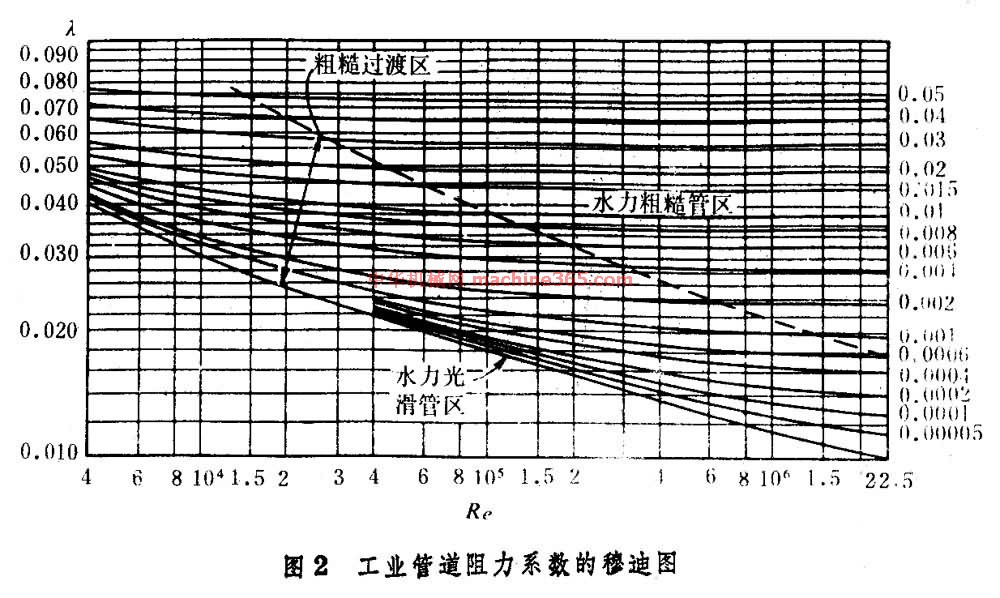 )。这两种沿程阻力係数图是J.尼库拉德塞和L.F.穆迪分别建立的。
)。这两种沿程阻力係数图是J.尼库拉德塞和L.F.穆迪分别建立的。
管网计算时﹐常需要对上述能量方程﹑局部和沿程水头损失的经验式或图表与连续方程(见流体动力学基本方程)一起联合求解。复杂管网一般可分解为串联和并联两种基本方式﹐这样就可以方便地算出整个管网的有关数据。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条