3) Industrial robots

工业机器人
1.
This paper introduces a scheme of DCS(Distributed Control System) for the scum-off industrial robots in production line of casting,including hardware structure and software system.
介绍了浇注生产线浮渣铲除工业机器人分布式控制系统的设计方案、硬件结构和软件体系。
2.
The prospect and quality of industrial robots depend on their reliability.
工业机器人的可靠性决定着它的应用前景及质量 ,而我国的工业机器人的可靠性并不容乐观 ,急需加以提高 ,针对这种情况 ,本文给出了三种有效的面向不同系统要求的工业机器人系统可靠度配置策略 :“最小努力及比例”分配法适用于首次研制出来、已投入使用并准备进行产品生产 ,进一步提高其可靠度的工业机器人系统 ;“混联”分配法是一种简便易行的工业机器人系统可靠度分配方法 ,此方法适用于在无约束条件下进行研制新型工业机器人时 ,对其进行的系统可靠度分配 ,使得所研制的工业机器人具有较高的可靠性 ;“两级优化”分配是在有约束条件下的一种可靠度优化分配方法。
3.
Based on an analysis of the relative shaft-to-hole position and attiude errors, as well as of the mechanics and Kinematics in the process of automatic assembly of industrial robots, the paper studies the principle of construction of dynamic wrists.
本文在对工业机器人自动装配过程中的轴孔相对位姿误差、力学和运动学进行分析研究的基础上,对动柔顺手腕结构原理作了深入探讨,设计、研制了一级三件和二级六件两种实用型动柔顺手腕,解决了柔顺件的制造和柔顺件与手腕的联结问题。
4) industrial robot
工业机器人
1.
3D modeling of industrial robot based on VC and Open GL;
基于VC和Open GL的工业机器人三维建模
2.
Tentative research on the control system of a kind of industrial robot based on the decoupling spheric joint;
基于解耦型球关节的工业机器人控制系统研究初探
3.
The Realization of Three-dimension of Industrial Robot In OPENGL;
OPENGL中工业机器人三维模型的实现
5) Industry robot
工业机器人
1.
This paper analysis the industry robot research status in china based on the works on the industry robot industrialization development through the national 863 high technology research projects, and make suggestions about the new series industry robot development in the fifth 863 high technology research project.
本文结合国家 86 3计划 15年来在工业机器人产业化开发方面所做的工作的基础上 ,对我国工业机器人研究现状进行了分析 ,同时对“十五”86 3计划在新一代工业机器人产品开发方面提出一些建
2.
Because reliability distribution is significant on its design of reliability, this papcr proposes three kinds of efficient reliability methods forindustry robot systems, and points out its trend.
由于工业机器人系统可靠度分配对其可靠性设计至关重要,因此,本文给出了两种有效的工业机器人系统可靠度分配策略,并指出了工业机器人系统可靠度分配策略的发展方向。
3.
According to commands, a leading or lagging phase voltage, which compares with feedback signal, is formed in the phase modulator to control the industry robot system.
本文详细介绍了直流电机驱动的五关节工业机器人的位置伺服系统的原理 ,并阐述了其工作过程。
6) robot
工业机器人
1.
Accomplishment of the Virtual Robot Modeling on VE Based on SolidWorks-VRML;
基于SolidWorks-VRML实现工业机器人在虚拟环境中建模
2.
Study on Vibration Control for Flexible Beam Robot
柔性臂工业机器人振动控制的研究
3.
In the end,an application on VR model of robot was provided.
最后给出了虚拟工业机器人的精确模型实例。
补充资料:工业炉:工业炉排烟系统
利用烟囱或机械装置将工业炉炉膛内的烟气排出炉外的系统。保证排烟通畅是工业炉正常使用的重要条件﹐排烟不通畅时﹐炉膛压力昇高﹐从炉膛四周的缝隙会逸出大量烟气而增加炉子的热损失﹐影响炉内气流的均匀分布﹐降低炉温均匀性﹐恶化操作环境。
排烟系统是由產生抽力的排烟装置和排送烟气的烟道所组成。常用的排烟装置有烟囱(图1 烟囱排烟装置  )﹑引风机或喷射管(图2 机械排烟装置
)﹑引风机或喷射管(图2 机械排烟装置 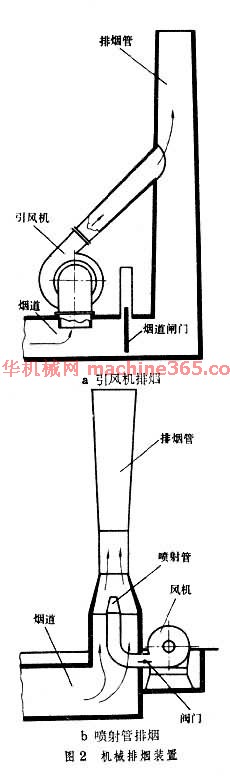 )等。
)等。
烟囱排烟是靠流入烟囱内热烟气密度小於烟囱外空气密度所產生的浮力﹐以克服烟道的阻力。利用引风机也可将烟气排出﹐或在排烟系统中某一部位装设一个喷射管﹐用高速喷射气体所產生的负压排出烟气。烟囱排烟不消耗动力﹐排烟温度不受限制。当排烟阻力很大而工业炉又间断运行时﹐可用引风机或喷射管排烟。喷射管适用於排除高温烟气﹔引风机适用於排除低温烟气。
烟囱分为砖砌烟囱﹑混凝土烟囱和钢板烟囱。烟道有地下烟道和架空烟道两种。地下烟道多用砖砌﹐架空烟道宜採用衬有耐火材料的钢板製成。
为了减少烟气对环境的污染﹐或因节能需要而在烟道内设置预热器时﹐都需要儘量提高烟囱高度并增加烟囱出口处的烟气流速﹐使之大於当地最大风速或至少不低於3米/秒﹐以避免烟气中的有害气体和烟尘向地面扩散。当烟囱高度达50米以上时﹐烟囱顶部的风速为地面处风速的数倍。烟气到达地面时已在离烟囱很远的地方﹐这时烟气已在逐步扩散中稀释到无害的程度。对燃烧固体燃料的工业炉﹐在排烟系统中还要设置各种形式的除尘器﹐使烟气排出时的含尘浓度降低到200微克/米3以下。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条