1) Remote Sensing Inversion Model

遥感反演模型
1.
Saline-alkali Soil Salinity Remote Sensing Inversion Model Based on BP Neural Network;
基于BP神经网络的盐碱土盐分遥感反演模型
2.
The Study Saline-alkali Soil Salinity Remote Sensing Inversion Model in the Arid Regions Based on BP Neural Network;
基于BP神经网络的干旱区盐碱土盐分遥感反演模型研究
2) quantitative remote sensing model
遥感反演模式
1.
Study on quantitative remote sensing models for measuring suspended sediment concentration;
悬浮泥沙浓度遥感反演模式研究
3) remote sensing inversion
遥感反演
1.
Research on Remote Sensing Inversion of Salt Content in Saline-alkali Soil Based on BP Neural Network in Songliao Plain;
基于BP神经网络的松辽平原盐碱土含盐量遥感反演研究
2.
It is usually assumed that the prior distributions of parameters and error are Gaussian distribution in remote sensing inversion.
在遥感反演中,通常假设反演参数和模型误差的先验分布服从正态分布,这个假设通常不太符合实际。
3.
We developed a priori knowledge based remote sensing inversion strategy.
在遥感反演中对先验知识的表达和应用方法是多阶段目标反演中急需解决的关键问题。
4) remote sensing retrieval
遥感反演
1.
The study of remote sensing retrieval model of surface suspended sediment concent
本论文的研究内容主要有:1、曹妃甸地区近海表层悬浮泥沙光谱特性的研究;2、曹妃甸地区近海海面光谱反射率与表层悬浮泥沙浓度关系模型的研究;3、曹妃甸地区近海表层悬浮泥沙遥感信息处理方法的研究;4、曹妃甸地区近海表层悬浮泥沙浓度遥感反演模型的研究;5、曹妃甸地区近海表层悬浮泥沙空间分布特征的研究。
2.
The atmospheric correction algorithms in the remote sensing retrieval for Case Ⅱ Waters are summarized,and the principles of the algorithms are expatiated.
系统总结了Ⅱ类水体遥感反演中的大气校正算法,对各种算法的原理进行了简单阐述,分析了各种算法的适应性以及存在的问题,并对未来Ⅱ类水体遥感反演中大气校正算法的发展进行了展望,为科研人员进一步开展相关研究提供一些参考。
5) remote sensing reflectance model
遥感反射率模型
1.
Based on the available study results of intrinsic optical property of ocean color constituents, a remote sensing reflectance model of sea water is proposed, and a method for optimizing the remote sensing reflectance model parameters is developed.
在吸收前人关于水色要素固有光学性质研究成果的基础上,给出了海水遥感反射率模型,提出了一种海水遥感反射率模型参数的优化方法,并以渤海辽东湾鲅鱼圈围隔实验获取的数据为例,探讨了模型参数优化结果的合理性。
6) ocean color remote sensing inversion model
水色遥感反演模式
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
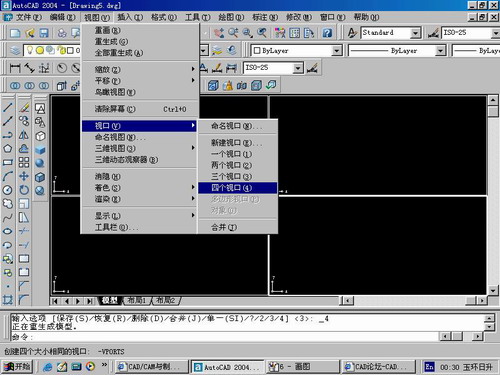
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
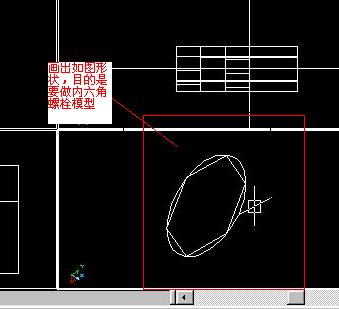
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
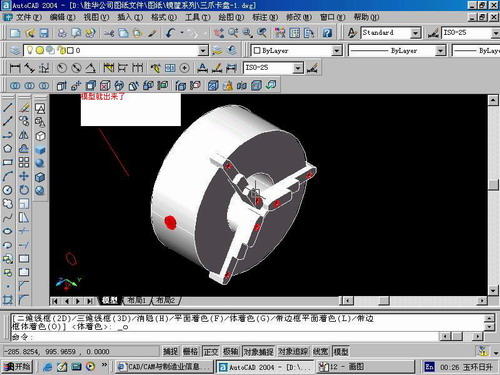
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条