1) 2DOF spherical Inverted Pendulum

二自由度平面倒立摆
2) planar double inverted pendulum
平面二级倒立摆
1.
The mathematical model of planar double inverted pendulum is founded at first by means of analytical dynamics.
本文对平面二级倒立摆运用分析动力学方法建立其数学模型,以LQR理论设计了平面倒立摆的最优控制器,在此基础上运用变量融合技术设计了参数自调整双模糊控制器,从而降低模糊控制器的输入变量维数,大大减少模糊控制的规则数,并研究了量化因子对控制效果的影响。
3) Planar inverted pendulum
平面倒立摆
1.
To realize the non-linear control over the swing-up of a planar inverted pendulum, a human-simulated intelligent control strategy based on sensory-motor schema is presented.
为实现平面倒立摆非线性系统的摆起控制,提出了一种基于动觉图式的仿人智能控制策略·该策略通过系统在线特征辨识与特征记忆,开闭环相结合的多模态控制以及直觉逻辑推理机制,使倒立摆摆杆从稳定平衡点摆起到不稳定平衡点并稳定不倒·仿真实验的结果证明:这种定性推理与定量控制相结合的智能控制器可以对具有复杂非线性、强耦合、自然不稳定特性的平面倒立摆系统实现摆起控制,同时也为其他非线性多变量系统的控制提供了有效方法
5) double inverted pendulum
二级倒立摆
1.
Control design of double inverted pendulum based on intrinsic characteristics of the system;
基于系统内部限制的二级倒立摆控制器
2.
The control of a double inverted pendulum by using hierarchical fuzzy neural network;
二级倒立摆的递阶模糊神经网络控制
3.
Simulation design of double inverted pendulum digital controller;
二级倒立摆数字控制器仿真设计
6) the double inverted pendulum
二级倒立摆
1.
This paper propose optimized the double inverted pendulum s length of the pole.
文中对二级倒立摆装置的摆长进行了优化,该方法确定的二级倒立摆的摆长参数能提高二级倒立摆的可控性,增强系统的适应性。
2.
By the use of LQR,we get an optimal control for the double inverted pendulum system and turn it to be effective by the MATLAB-simulated experiments.
本文建立了二级倒立摆的数学模型,并推导出模型的状态空间表达式,分析了系统的稳定性,能控性和能观性,利用了线性二次型最优调节器(LQR)方法实现对二级倒立摆的最优控制,MATLAB仿真结果表明了该方法的有效性。
补充资料:长度计量技术:平面度测量
长度计量技术中对平面度误差的测量。平面是由直线组成的﹐因此直线度测量中直尺法﹑光学準直法﹑光学自準直法﹑重力法等也适用於测量平面度误差。测量平面度时﹐先测出若干截面的直线度﹐再把各测点的量值按平面度公差带定义(见形位公差)利用图解法或计算法进行数据处理即可得出平面度误差。也有利用光波干涉法和平板涂色法测量平面误差的。光波干涉法常利用平晶进行﹐图 用平晶测量平面得到的干涉条纹 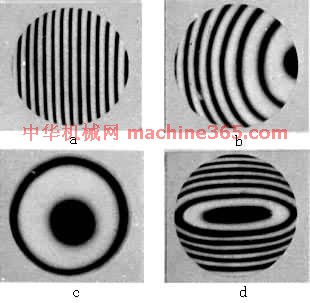 为测量所得的不同干涉条纹。图中a 用平晶测量平面得到的干涉条纹 的干涉条纹是直的﹐而且间距相等﹐只在周边上稍有弯曲。这说明被检验表面是平的﹐但与光学平晶不平行﹐而且在圆周部分有微小的偏差。图中b 用平晶测量平面得到的干涉条纹 的干涉条纹弯曲而且间隔不相等﹐表明被检验表面是球形的﹐平晶有微小倾斜。条纹弯曲度约为条纹间距的1.5倍﹐表示平面度误差为1.5×0.3μm=0.45μm。图中c 用平晶测量平面得到的干涉条纹 的干涉条纹呈圆形﹐同样表明被检验表面是球形表面。将条纹数目乘以所用光束波长的一半﹐即得所求的平面误差为1.5×0.3μm=0.45μm。图中d 用平晶测量平面得到的干涉条纹 的干涉条纹成椭圆形排列﹐说明被检验表面是桶形的。可以把干涉图案作为被检验表面的等高线﹐因此可以画出该表面的形状。这种方法仅适宜测量高光洁表面﹐测量面积也较小﹐但测量精确度很高。
为测量所得的不同干涉条纹。图中a 用平晶测量平面得到的干涉条纹 的干涉条纹是直的﹐而且间距相等﹐只在周边上稍有弯曲。这说明被检验表面是平的﹐但与光学平晶不平行﹐而且在圆周部分有微小的偏差。图中b 用平晶测量平面得到的干涉条纹 的干涉条纹弯曲而且间隔不相等﹐表明被检验表面是球形的﹐平晶有微小倾斜。条纹弯曲度约为条纹间距的1.5倍﹐表示平面度误差为1.5×0.3μm=0.45μm。图中c 用平晶测量平面得到的干涉条纹 的干涉条纹呈圆形﹐同样表明被检验表面是球形表面。将条纹数目乘以所用光束波长的一半﹐即得所求的平面误差为1.5×0.3μm=0.45μm。图中d 用平晶测量平面得到的干涉条纹 的干涉条纹成椭圆形排列﹐说明被检验表面是桶形的。可以把干涉图案作为被检验表面的等高线﹐因此可以画出该表面的形状。这种方法仅适宜测量高光洁表面﹐测量面积也较小﹐但测量精确度很高。
为测量所得的不同干涉条纹。图中a 用平晶测量平面得到的干涉条纹 的干涉条纹是直的﹐而且间距相等﹐只在周边上稍有弯曲。这说明被检验表面是平的﹐但与光学平晶不平行﹐而且在圆周部分有微小的偏差。图中b 用平晶测量平面得到的干涉条纹 的干涉条纹弯曲而且间隔不相等﹐表明被检验表面是球形的﹐平晶有微小倾斜。条纹弯曲度约为条纹间距的1.5倍﹐表示平面度误差为1.5×0.3μm=0.45μm。图中c 用平晶测量平面得到的干涉条纹 的干涉条纹呈圆形﹐同样表明被检验表面是球形表面。将条纹数目乘以所用光束波长的一半﹐即得所求的平面误差为1.5×0.3μm=0.45μm。图中d 用平晶测量平面得到的干涉条纹 的干涉条纹成椭圆形排列﹐说明被检验表面是桶形的。可以把干涉图案作为被检验表面的等高线﹐因此可以画出该表面的形状。这种方法仅适宜测量高光洁表面﹐测量面积也较小﹐但测量精确度很高。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条