2) gun servo system

火炮伺服系统
1.
By means of Rough Fuzzy Neural Networks,the inverse model of the bearing position affected by fire moment disturbance in the gun servo system was set up,and acquired model.
将粗糙集理论中的贪心算法和缺省规则获取算法应用到补偿模糊神经网络的输入模糊化和规则提取中,构成粗糙集模糊神经网络;利用此网络对受到射击力矩扰动影响的某方位向火炮伺服系统进行逆建模,并将学习得到的模型作为逆控制系统的控制器来消除扰动。
2.
Anolog speed signal VEL from SDC is also taken as speed feedback signal to form speed loop in gun servo system.
SDC输出的模拟速度信号VEL还可以作为速度反馈信号以构成火炮伺服系统中的速度回路。
3) Position servo system
位置伺服系统
1.
Model identification and control method of electro-hydraulic position servo system;
电液位置伺服系统模型辨识及其控制方法
2.
Design of a DC motor position servo system using a digital controller MC9S12;
直流电机位置伺服系统驱动器设计
3.
Oscillation caused by quantized feedback in position servo system;
位置伺服系统量化效应引起的振荡问题
4) positioning servo system
位置伺服系统
1.
The positioning servo system is controlled by a conventional feedback controller and a feedforward controller.
利用前馈控制与传统的反馈控制相结合来控制位置伺服系统,由实时遗传算法在线调整前馈控制器参数,使其为对象的逆模型。
5) CNC position servo system
CNC位置伺服系统
6) position control system
位置伺服系统
1.
This paper introduced the constitution and specific design of robot with six DOF and researched the position control system of single joint of robot.
本文主要阐述了六自由度机械手本体的总体构成及其具体的结构设计,并对机械手单关节位置伺服系统进行了研究。
补充资料:传动:液压伺服系统
以高压液体作为驱动源的伺服系统。液压伺服系统是由液压动力机构和反馈机构组成的闭环控制系统﹐分为机械液压伺服系统和电气液压伺服系统(简称电液伺服系统)两类。其中﹐机械液压伺服系统应用较早﹐主要用於飞机的舵面控制和机床仿型装置上。随著电液伺服阀的出现﹐电液伺服系统在自动化领域佔有重要位置。很多大功率快速响应的位置控制和力控制都应用电液伺服系统﹐如飞机﹑导弹的舵机控制系统﹐船舶的舵机系统﹐雷达﹑大炮的随动系统﹐轧钢机械的液压压下系统﹐机械手控制和各种科学试验装置(飞行模拟转台﹑振动试验台)等。
液压伺服系统与电气伺服系统相比有三个优点﹕(1)体积小﹐重量轻﹐惯性小﹐可靠性好﹐输出功率大﹔(2)快速性好﹔(3)刚度大(即输出位移受外负载影响小)﹐定位準确。缺点是加工难度高﹐抗污染能力差﹐维护不易﹐成本较高。
电液伺服系统 电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。最常见的有电液位置伺服系统﹑电液速度控制系统和电液力(或力矩)控制系统。
图1 电液位置伺服系统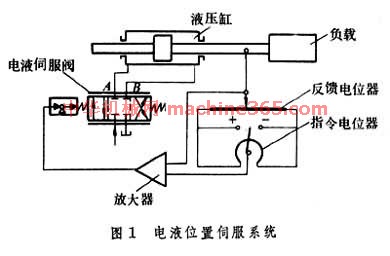 是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。
是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。
电液伺服系统中常用的位置检测元件有自整角机﹑旋转变压器﹑感应同步器和差动变压器等。伺服放大器为伺服阀提供所需要的驱动电流。电液伺服阀的作用是将小功率的电信号转换为阀的运动﹐以控制流向液压动力机构的流量和压力。因此﹐电液伺服阀既是电液转换元件又是功率放大元件﹐它的性能对系统的特性影响很大﹐是电液伺服系统中的关键元件。液压动力机构由液压控制元件﹑执行机构和控制对象组成。液压控制元件常採用液压控制阀或伺服变量泵。常用的液压执行机构有液压缸和液压马达。液压动力机构的动态特性在很大程度上决定了电液伺服系统的性能。
液压伺服系统与电气伺服系统相比有三个优点﹕(1)体积小﹐重量轻﹐惯性小﹐可靠性好﹐输出功率大﹔(2)快速性好﹔(3)刚度大(即输出位移受外负载影响小)﹐定位準确。缺点是加工难度高﹐抗污染能力差﹐维护不易﹐成本较高。
电液伺服系统 电液伺服系统是一种由电信号处理装置和液压动力机构组成的反馈控制系统。最常见的有电液位置伺服系统﹑电液速度控制系统和电液力(或力矩)控制系统。
图1 电液位置伺服系统
是一个典型的电液位置伺服控制系统。图中反馈电位器与指令电位器接成桥式电路。反馈电位器滑臂与控制对象相连﹐其作用是把控制对象位置的变化转换成电压的变化。反馈电位器与指令电位器滑臂间的电位差(反映控制对象位置与指令位置的偏差)经放大器放大后﹐加於电液伺服阀转换为液压信号(图中A ﹑B )﹐以推动液压缸活塞﹐驱动控制对象向消除偏差方向运动。当偏差为零时﹐停止驱动﹐因而使控制对象的位置总是按指令电位器给定的规律变化。 电液伺服系统中常用的位置检测元件有自整角机﹑旋转变压器﹑感应同步器和差动变压器等。伺服放大器为伺服阀提供所需要的驱动电流。电液伺服阀的作用是将小功率的电信号转换为阀的运动﹐以控制流向液压动力机构的流量和压力。因此﹐电液伺服阀既是电液转换元件又是功率放大元件﹐它的性能对系统的特性影响很大﹐是电液伺服系统中的关键元件。液压动力机构由液压控制元件﹑执行机构和控制对象组成。液压控制元件常採用液压控制阀或伺服变量泵。常用的液压执行机构有液压缸和液压马达。液压动力机构的动态特性在很大程度上决定了电液伺服系统的性能。
说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条