1) Bltrami-Klein model

Beltrami Klein模型
1.
It is proved that relativistic velocity make up of Bltrami-Klein model of hyperbolic geometry.
用光速不变原理直接导出洛伦兹速度变换式 ,并证明相对论性速度构成双曲几何的Beltrami Klein模型 。
2) Klein-Gordon model
Klein-Gordon模型
1.
Time-dependent variational approach to dispersion relation of the quantum Klein-Gordon model
量子Klein-Gordon模型色散关系的含时变分法研究
3) Beltrami differential
Beltrami微分
4) Beltrami flow
Beltrami流动
1.
Generally speaking, there are two special flows in nature: one isthe Beltrami flow defined by ω=λu; another is the lamellar flow satisfying ω.
一般而言,流体力学中有两种特殊的流动:一种是Beltrami流动,另一种就是层状流动。
2.
A lattice Boltzmann scheme for the distribution of the displacements in the Beltrami flow is proposed.
给出 Beltrami流动中流体质点位移的格子 Boltzmann算法 。
5) Beltrami equation
Beltrami方程
1.
On normal solutions of a class of the Beltrami equations;
Beltrami方程正规解的一个注记
2.
In this paper, we change the Beltrami systems of equations into “one Beltrami equation”.
将所有维数的 Beltrami方程组 Dtf· Df =J2 /n G化为一个“Beltrami方程”并利用它研究了 Bel-trami方程组的解的正则性 ,得到一个比文献 [8]更大的正则性区间 。
3.
The Beltrami equation is applied widely on Hydrodynamics、 Elastic mechanics and Modern control theory with the development of the Cauchy-Riemann equation.
Beltrami方程作为Cauchy-Riemann方程的推广在流体力学、弹性力学和现代控制理论等领域都有着广泛的应用。
6) Beltrami system
Beltrami方程组
1.
The following result is given by using Hodge decomposition:if f∈W 1,n(1-ε) 0(Ω,R n),n>33,be a generalized solution of Beltrami system (1) and ε<14×10 4 log nab n/2 ,where a and b come from (2),then f=0, a.
使用Hodge分解得到了下列结果 :若f∈W1,n(1-ε)0 (Ω ,Rn) ,n>33为Beltrami方程组 (1 )的广义解 ,并且ε<14× 1 0 4lognabn/2 ,这里a与b来自 (2 ) ,则f=0 ,a 。
2.
The weak monotonicity for component functions of weak solutions of Beltrami system in space is derived.
该文引入一类新的函数空间,并借助于此空间,研究了A-调和方程很弱解的弱单调性,并得到了空间Beltrami方程组弱解分量函数的弱单调性。
补充资料:AutoCad 教你绘制三爪卡盘模型,借用四视图来建模型
小弟写教程纯粹表达的是建模思路,供初学者参考.任何物体的建摸都需要思路,只有思路多,模型也就水到渠成.ok废话就不说了.建议使用1024X768分辨率
开始
先看下最终效果
第一步,如图所示将窗口分为四个视图
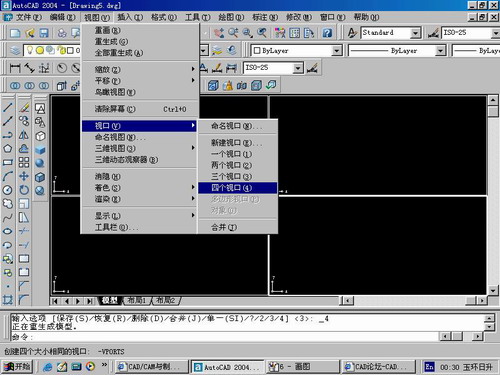
第二步,依次选择每个窗口,在分别输入各自己的视图
第三步,建立ucs重新建立世界坐标体系,捕捉三点来确定各自的ucs如图

第四步,初步大致建立基本模型.可以在主视图建立两个不同的圆,在用ext拉升,在用差集运算.如图:
第五步:关键一步,在此的我思路是.先画出卡爪的基本投影,在把他进行面域,在进行拉升高度分别是10,20,30曾t形状.如图:
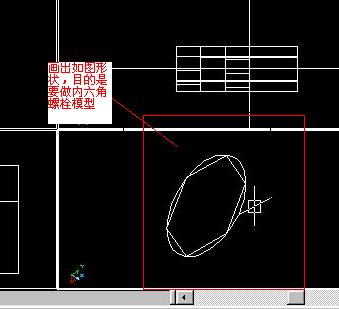
第六步:画出螺栓的初步形状.如图
第七步:利用ext拉升圆,在拉升内六边形.注意拉升六边行时方向与拉升圆的方向是相反的.
之后在利用差集运算
第八步:将所得内螺栓模型分别复制到卡爪上,在利用三个视图调到与卡爪的中心对称.效果如图红色的是螺栓,最后是差集
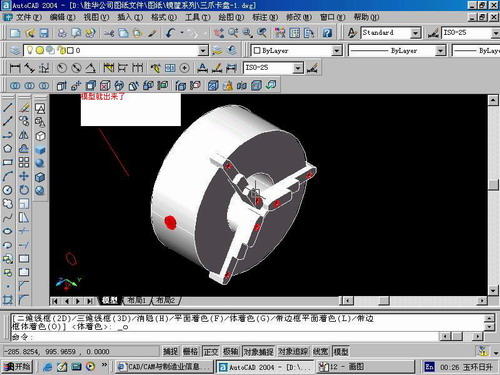
第九步:阵列
第10步.模型就完成了
来一张利用矢量处理的图片

说明:补充资料仅用于学习参考,请勿用于其它任何用途。
参考词条